21/08/2005
Forståelse af softwareudvikling til droner er afgørende for enhver, der er interesseret i at skabe innovative og virkningsfulde applikationer til ubemandede luftfartøjer (UAV'er). Fra at styre basale flyvemanøvrer til at muliggøre komplekse autonome missioner spiller softwaren en central rolle i at forme kapaciteterne hos moderne droner. Både spirende udviklere og droneentusiaster kan begive sig ud på en rejse for at udnytte det fulde potentiale i disse flyvende maskiner ved at forstå de centrale komponenter, programmeringssprog og nye tendenser inden for drone-softwareudvikling.
Hvad er Droneprogrammering?
Droneprogrammering kan sammenlignes med at give din drone et sæt instruktioner, den skal følge. Det er den kode, der fortæller dronen, hvordan den skal flyve, navigere, indsamle data og udføre specifikke opgaver. Tænk på det som hjernen bag dronens handlinger, der gør det muligt for den at operere selvstændigt eller via fjernstyring. Uden denne software ville en drone blot være en samling af hardware uden formål.
Nøglekomponenter i Dronesoftware
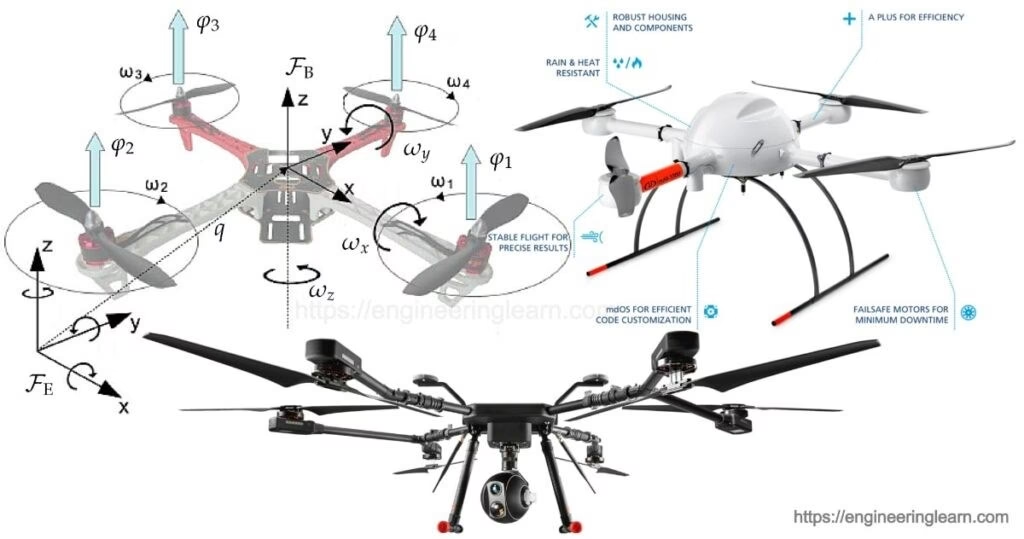
Dronesoftware er et komplekst system, hvor flere nøglekomponenter arbejder sammen for at sikre en stabil og funktionel flyvning:
- Flyvekontroller (Flight Controller): Dette er kernen i dronens hjerne, ansvarlig for stabilitet og kontrol. Den behandler data fra sensorer og omsætter pilotens kommandoer til handlinger for motorerne.
- Kommunikationssystemer: Droner skal kommunikere med jordkontrolstationer eller andre enheder. Dette sker ofte via radiofrekvens eller mobilnetværk for at sikre en konstant forbindelse.
- Databehandling: Droner indsamler enorme mængder data, såsom billeder, videoer og sensoraflæsninger. Softwaren behandler disse data til analyse og beslutningstagning, hvilket er afgørende for missionens succes.
- Brugergrænseflade (User Interface): Dette er måden, hvorpå piloter interagerer med dronen, enten via en mobilapp eller en dedikeret controller. En veludformet brugergrænseflade gør det lettere at flyve og styre dronen.
- Sensorintegration: Droner er afhængige af forskellige sensorer som GPS, kameraer og LiDAR. Softwaren integrerer disse sensorer for at levere realtidsinformation og muliggøre autonom flyvning.
Programmeringssprog til Droner
Flere programmeringssprog anvendes i droneudvikling, hver med sine egne styrker og anvendelsesområder. Valget af sprog afhænger ofte af den specifikke opgave, der skal løses, lige fra lav-niveau kontrol til høj-niveau dataanalyse.
- C/C++: Disse lav-niveau sprog bruges ofte til flyvekontrollere og realtidssystemer på grund af deres effektivitet og ydeevne. De giver udvikleren tæt kontrol over hardwaren.
- Python: Et populært høj-niveau sprog kendt for sin læsbarhed og enkelhed. Python bruges almindeligt til databehandling, maskinlæring og computer vision-applikationer i dronesoftware.
- Java/Kotlin: Disse sprog bruges til at udvikle Android-baserede dronekontrolapps og brugergrænseflader, hvilket gør dem essentielle for mobil integration.
- Swift: Det primære sprog til at skabe iOS-baserede dronekontrolapps, hvilket sikrer en problemfri oplevelse for Apple-brugere.
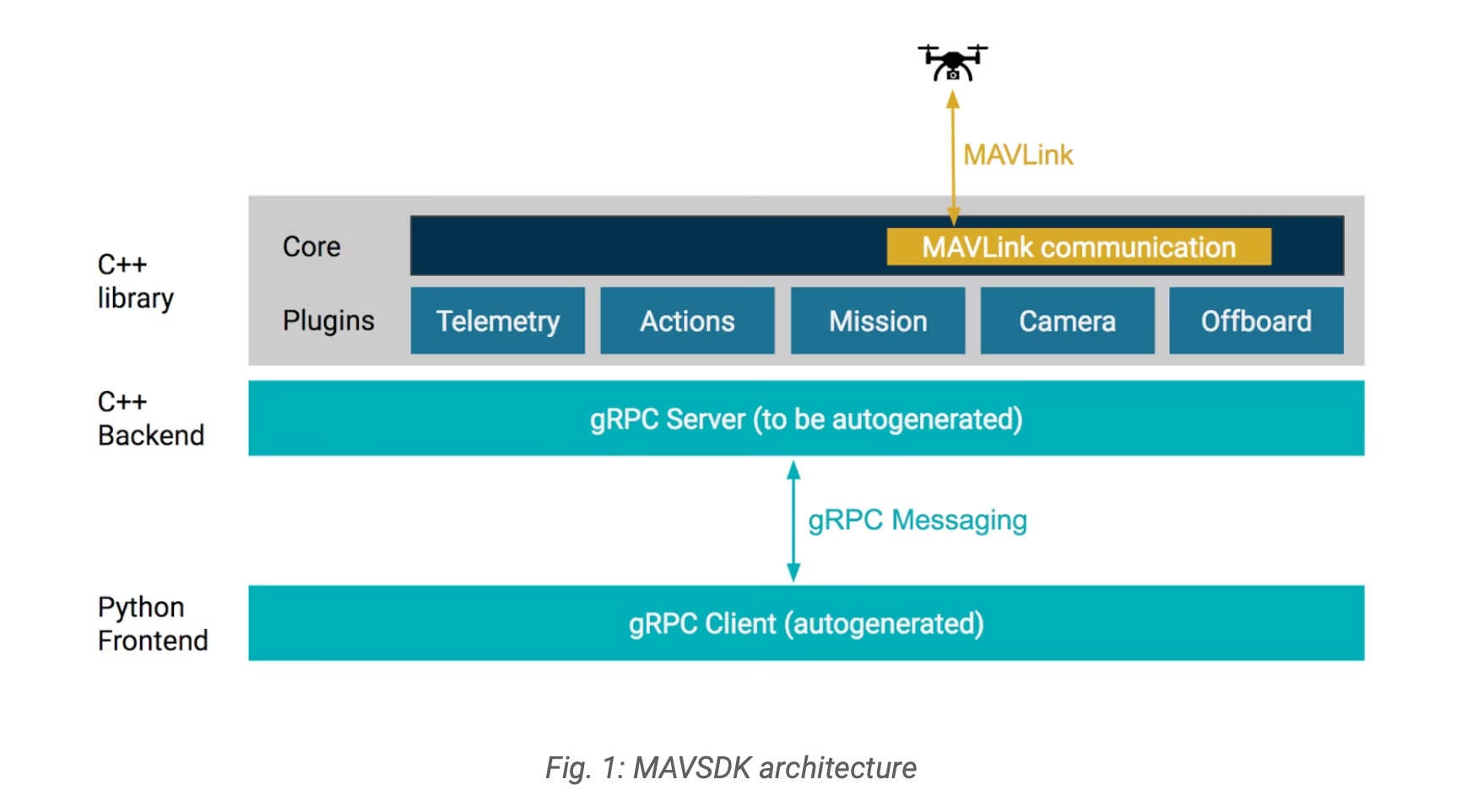
Populære Softwareplatforme til Droner
Adskillige softwareplatforme letter droneprogrammering og -udvikling ved at tilbyde færdige værktøjer og rammer. Disse platforme kan markant reducere udviklingstiden og kompleksiteten. Nedenfor sammenlignes to af de mest anerkendte open source-platforme.
| Funktion | PX4 Autopilot | ArduPilot |
|---|---|---|
| Licens | Open-source (BSD) | Open-source (GPLv3) |
| Styrker | Modularitet, fleksibilitet, ideel til forskning og udvikling. | Bred understøttelse af dronetyper, god til kommercielle applikationer. |
| Svagheder | Kan være kompleks at sætte op for begyndere. | Mindre fleksibel end PX4 i sin arkitektur. |
| Ideelle Anvendelser | Forskning, specialbyggede droner, avancerede applikationer. | Kommercielle droner, standardmissioner, bred hardwarekompatibilitet. |
Udover PX4 Autopilot og ArduPilot findes der andre vigtige platforme som DroneKit, et Python-bibliotek, der forenkler dronekontrol med kommandoer på højt niveau, og DJI SDK, som giver adgang til DJI-droners funktioner for udvikling af brugerdefinerede apps. For simulering er AirSim en uvurderlig open source-simulator, der lader udviklere teste deres software i et realistisk virtuelt miljø.
Rollen af AI og Machine Learning
Kunstig intelligens (AI) og machine learning revolutionerer droners kapabiliteter og gør dem i stand til at udføre opgaver, der tidligere var utænkelige.
- Objektdetektering og sporing: Droner kan identificere og følge objekter i realtid, hvilket muliggør autonome opgaver som levering eller overvågning. Algoritmer som YOLO (You Only Look Once) er nøglen til denne funktionalitet.
- Ruteplanlægning og navigation: AI-algoritmer kan optimere flyveruter for effektivitet og sikkerhed, selv i komplekse miljøer. Algoritmer som A* finder den korteste og sikreste vej ved at tage højde for forhindringer.
- Dataanalyse og fortolkning: Machine learning-modeller kan analysere data indsamlet af droner for at udtrække værdifuld indsigt for forskellige industrier, f.eks. landbrug eller byggeri.
- Forudsigende vedligeholdelse: AI kan forudsige potentielle udstyrsfejl, hvilket reducerer nedetid og vedligeholdelsesomkostninger for droneflåder.
Kom i Gang med Droneprogrammering: Et Kodeeksempel
Her er et simpelt eksempel på Python-kode, der bruger DroneKit-biblioteket til at sende en grundlæggende kommando til en drone. Dette eksempel viser, hvordan man forbinder til dronen, letter til en bestemt højde, svæver og derefter lander.
from dronekit import connect, VehicleMode import time # Forbind til dronen (her via en simuleret forbindelse) vehicle = connect('udp:127.0.0.1:14550', wait_ready=True) print("Forbinder til drone...") # Funktion til at lette dronen til en målhøjde def arm_and_takeoff(target_altitude): print("Armerer motorer") while not vehicle.is_armable: time.sleep(1) vehicle.mode = VehicleMode("GUIDED") vehicle.armed = True while not vehicle.armed: time.sleep(1) print("Letter!") vehicle.simple_takeoff(target_altitude) # Vent til dronen når målhøjden while True: print(f" Nuværende højde: {vehicle.location.global_relative_frame.alt:.2f}m") if vehicle.location.global_relative_frame.alt >= target_altitude * 0.95: print("Målhøjde nået") break time.sleep(1) # Start missionen arm_and_takeoff(10) # Letter til 10 meter print("Svæver i 10 sekunder") time.sleep(10) print("Returnerer til startposition og lander") vehicle.mode = VehicleMode("RTL") # Luk forbindelsen print("Lukker forbindelsen") vehicle.close() Ofte Stillede Spørgsmål (FAQ)
Hvilke programmeringssprog er mest almindelige til droneudvikling?
Python, C++ og Java/Kotlin er blandt de mest anvendte. Python er ideelt til hurtig prototyping, dataanalyse og AI-applikationer. C++ bruges til performance-kritiske systemer som flyvekontrolleren. Java/Kotlin og Swift bruges primært til at udvikle kontrolapps til henholdsvis Android og iOS.
Hvordan starter man en karriere inden for droneprogrammering?
En god start er at opbygge færdigheder inden for relevante programmeringssprog og få en dyb forståelse for dronehardware og -software. Online kurser, open source-projekter som ArduPilot og PX4, samt praktisk erfaring med udviklingskits som DJI SDK er fremragende måder at opbygge en portefølje på.
Hvordan fungerer sensorfusion i dronesoftware, og hvorfor er det vigtigt?
Sensorfusion er processen, hvor data fra flere forskellige sensorer (f.eks. GPS, IMU, barometer) kombineres for at give en mere præcis og pålidelig vurdering af dronens position, orientering og hastighed, end en enkelt sensor kunne levere alene. Det er afgørende for stabil flyvning og autonom navigation.
Hvad er nogle af de største udfordringer ved udvikling af dronesoftware?
Nogle af de primære udfordringer inkluderer at sikre realtidsydelse, håndtere begrænset batterilevetid, udvikle robuste systemer til at undgå forhindringer, sikre pålidelig kommunikation og overholde komplekse lovgivningsmæssige krav. Sikkerhed mod hacking er også en voksende bekymring.
Hvis du vil læse andre artikler, der ligner Guide til Platforme for Droneprogrammering, kan du besøge kategorien Teknologi.