21/09/2007
I en verden, hvor teknologi er dybt integreret i næsten alle aspekter af vores liv, fra de biler vi kører, til det medicinske udstyr der holder os sunde, findes der en særlig type software, der arbejder stille i baggrunden for at sikre præcision og pålidelighed. Mens de fleste af os er bekendt med operativsystemer som Windows, macOS eller Android, er der en anden, mere specialiseret kategori: realtidsoperativsystemet, eller RTOS (Real-Time Operating System). Disse systemer er de usungne helte i utallige kritiske applikationer, hvor timing ikke bare er vigtig – den er altafgørende.

Et realtidsoperativsystem er designet til at håndtere og behandle data og hændelser, i det øjeblik de opstår. I modsætning til et almindeligt operativsystem, der prioriterer at køre mange opgaver samtidigt for en god brugeroplevelse, er et RTOS' primære formål at levere en forudsigelig og garanteret respons inden for en streng tidsfrist. Denne artikel fungerer som en komplet guide til realtidsoperativsystemer, hvor vi vil udforske, hvad de er, hvordan de fungerer, de forskellige typer, og hvorfor de er uundværlige i moderne teknologi.
Hvad adskiller et RTOS fra et almindeligt operativsystem (GPOS)?
For at forstå et RTOS fuldt ud er det nyttigt at sammenligne det med et almindeligt operativsystem (General-Purpose Operating System, GPOS), som det, du bruger på din computer eller smartphone. Deres designfilosofier og formål er fundamentalt forskellige.
Et GPOS, som f.eks. Linux eller Windows, er optimeret til multitasking og retfærdighed. Det sigter mod at give alle kørende applikationer en 'fair' andel af processorkraften, så du kan surfe på internettet, lytte til musik og skrive et dokument på samme tid. Systemet kan introducere små, variable forsinkelser afhængigt af den samlede belastning, hvilket normalt ikke er et problem for brugeren.
Et RTOS, derimod, opererer med en streng deterministisk planlægningsmodel. Her er determinisme nøgleordet, hvilket betyder, at en opgave garanteres at blive udført inden for en præcist defineret tidsramme, hver eneste gang. For et RTOS er det vigtigere at overholde en deadline end at køre mange opgaver hurtigt. Denne forudsigelighed er afgørende i systemer, hvor en forsinkelse på få millisekunder kan have katastrofale konsekvenser.
Sammenligningstabel: GPOS vs. RTOS
| Funktion | General-Purpose OS (GPOS) | Real-Time OS (RTOS) |
|---|---|---|
| Primært mål | Brugeroplevelse og multitasking | Overholdelse af tidsfrister og forudsigelighed |
| Planlægning | Retfærdig og tidsdelingsbaseret | Prioritetsbaseret og deterministisk |
| Latens (forsinkelse) | Variabel og generelt højere | Minimal og garanteret lav |
| Anvendelsesområder | Stationære computere, smartphones, servere | Indlejrede systemer, robotteknologi, medicinsk udstyr |
| Ressourcehåndtering | Fleksibel, ofte med dynamisk hukommelsesallokering | Streng, ofte med statisk hukommelsesallokering for forudsigelighed |
Forskellige typer af realtidsoperativsystemer
Begrebet 'realtid' er ikke monolitisk. Der findes forskellige grader af tidskrav, hvilket fører til tre hovedkategorier af RTOS:
1. Hårde realtidssystemer (Hard Real-Time Systems)
I et hårdt realtidssystem er det at misse en deadline en total systemfejl med potentielt katastrofale konsekvenser. Systemet skal absolut garantere, at kritiske opgaver afsluttes inden for deres specificerede tidsvindue. Disse systemer er afgørende for sikkerhedskritiske applikationer.
Eksempler: Airbag-udløsningssystemer i biler, pacemakere, flykontrolsystemer (avionik) og anti-blokeringsbremsesystemer (ABS).
2. Bløde realtidssystemer (Soft Real-Time Systems)
I et blødt realtidssystem er det uønsket at misse en deadline, men det fører ikke til en systemfejl. I stedet vil det resultere i en forringelse af ydeevnen. Systemet prioriterer stadig realtidsopgaver, men uden de samme strenge garantier som i et hårdt system.
Eksempler: Live videostreaming, hvor en forsinkelse kan forårsage et midlertidigt 'hak' i billedet, eller komplekse multimedieanimationer.
3. Faste realtidssystemer (Firm Real-Time Systems)
Denne kategori ligger mellem hård og blød realtid. Her betragtes det at misse en deadline som en systemfejl, men konsekvenserne er ikke katastrofale for sikkerheden. Resultatet af en for sen opgave kan være ubrugeligt, hvilket kan føre til produktionsproblemer eller tab af data.
Eksempler: Systemer til fabriksautomation, hvor en robotarm skal placere en komponent på et samlebånd på et præcist tidspunkt. Hvis den er forsinket, kan produktet blive defekt, men det forårsager ikke en farlig situation.
Hvordan fungerer et RTOS?
Et RTOS opnår sin forudsigelige adfærd gennem en kombination af flere kernemekanismer, der arbejder tæt sammen for at styre systemets ressourcer med ekstrem præcision.
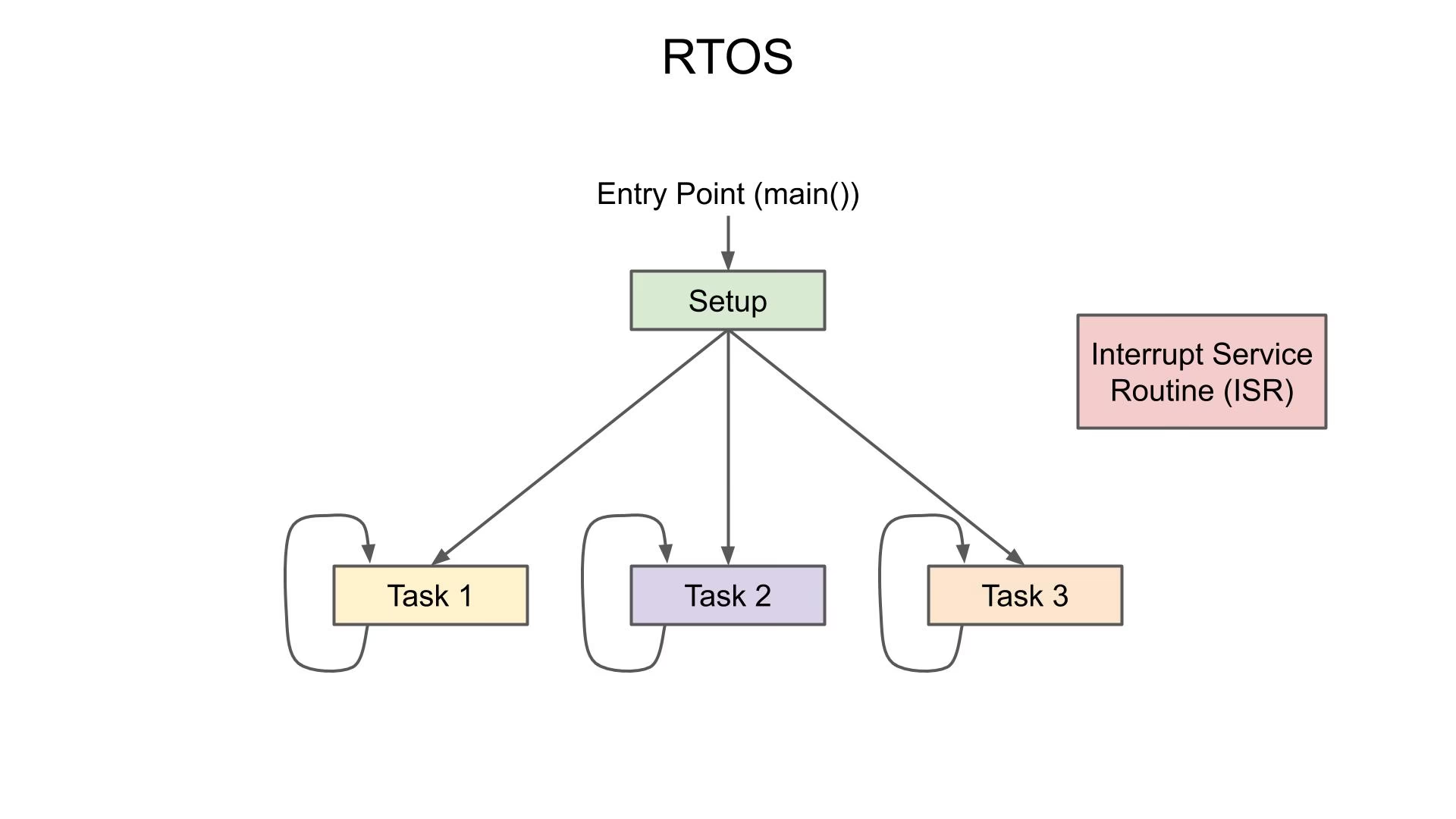
- Opgaveplanlægning (Task Scheduling): Dette er hjertet i et RTOS. En scheduler beslutter, hvilken opgave der skal køre på et givet tidspunkt. I modsætning til GPOS bruger RTOS typisk en præemptiv, prioritetsbaseret planlægning. Det betyder, at hvis en opgave med højere prioritet bliver klar til at køre, vil den øjeblikkeligt afbryde (præemptere) den kørende opgave med lavere prioritet.
- Afbrydelseshåndtering (Interrupt Management): RTOS er designet til at have en ekstremt lav afbrydelseslatens. Latens er den tid, det tager fra en ekstern hændelse (f.eks. et sensorsignal) genererer en afbrydelse, til systemet begynder at udføre den kode, der skal håndtere hændelsen. Dette sikrer en næsten øjeblikkelig reaktion på kritiske input.
- Kommunikation og synkronisering: I et system med mange samtidige opgaver er der behov for mekanismer, der lader dem kommunikere og synkronisere deres handlinger sikkert. Et RTOS tilbyder værktøjer som semaforer, mutexer og meddelelseskøer for at forhindre race conditions og sikre data-integritet.
- Ressourceallokering: Systemets ressourcer, såsom CPU-tid, hukommelse og perifere enheder, tildeles omhyggeligt baseret på opgavernes prioritet og behov. Mange RTOS anvender statisk hukommelsesallokering for at undgå de uforudsigelige forsinkelser, der kan opstå ved dynamisk allokering.
Fordele og udfordringer ved at bruge et RTOS
Valget af et RTOS bringer betydelige fordele, men også unikke udfordringer, som udviklere skal håndtere.
Fordele
- Forudsigelighed: Den primære fordel er garantien for, at opgaver udføres inden for deres tidsfrister.
- Ressourcekontrol: Udviklere har finmasket kontrol over systemets ressourcer, hvilket sikrer, at kritiske opgaver altid prioriteres.
- Effektivitet: RTOS er typisk designet til at have et lille hukommelsesfodaftryk og lavt strømforbrug, hvilket gør dem ideelle for indlejrede systemer med begrænsede ressourcer.
- Pålidelighed: Deres deterministiske natur gør dem ekstremt stabile og pålidelige, hvilket er afgørende i missionskritiske systemer.
Udfordringer
- Kompleksitet: At designe og programmere for et RTOS kræver specialiseret viden. Problemer som prioritetsinversion (hvor en opgave med lav prioritet blokerer en opgave med høj prioritet) skal håndteres omhyggeligt.
- Debugging: Fejlfinding i et realtidssystem kan være yderst vanskeligt, da timing-relaterede fejl kan være svære at reproducere.
- Begrænsede ressourcer: Mange RTOS kører på hardware med begrænset hukommelse og processorkraft, hvilket stiller store krav til effektiv kode.
- Sikkerhed: Da RTOS ofte bruges i kritiske systemer, er det afgørende at implementere robuste sikkerhedsforanstaltninger for at beskytte mod angreb.
Eksempler på RTOS i den virkelige verden
Realtidsoperativsystemer er overalt omkring os, selvom vi sjældent bemærker dem. Her er nogle nøgleområder, hvor de spiller en afgørende rolle:
- Bilindustrien: Moderne biler indeholder snesevis af mikrocontrollere, der kører RTOS. De styrer alt fra motorstyringsenheder (ECU'er) og avancerede førerassistentsystemer (ADAS) til infotainmentsystemer.
- Luftfart og forsvar: Fra flykontrolsystemer i kommercielle fly til navigationssystemerne i NASA's Mars rovere er RTOS afgørende for at garantere sikker og præcis drift under ekstreme forhold.
- Medicinsk udstyr: I sundhedssektoren driver RTOS livsvigtigt udstyr som patientovervågningssystemer, infusionspumper, pacemakere og robotkirurgiske instrumenter, hvor præcis timing kan betyde forskellen mellem liv og død.
- Industriel automation: I smarte fabrikker styrer RTOS robotarme, samlebånd og proceskontrolsystemer (PLC'er), hvilket sikrer høj effektivitet og minimal latens i produktionsprocesser.
- Telekommunikation: Netværksudstyr som routere, switches og 5G-basestationer bruger RTOS til at behandle datapakker i realtid og sikre stabil og hurtig kommunikation.
Ofte Stillede Spørgsmål (FAQ)
Hvad er et realtidsoperativsystem (RTOS)?
Et realtidsoperativsystem (RTOS) er et operativsystem, der er designet til at behandle opgaver inden for strenge tidsfrister, hvilket sikrer en hurtig og forudsigelig respons. Det bruges primært i indlejrede systemer, automation og andre tidskritiske applikationer.
Hvad er forskellen mellem et almindeligt OS og et RTOS?
Et almindeligt OS (som Windows eller Linux) fokuserer på multitasking og brugeroplevelse og tillader variable forsinkelser. Et RTOS prioriterer derimod deterministisk opgaveudførelse og garanterer, at opgaver afsluttes inden for en fastsat deadline.
Hvad er de primære anvendelser for et RTOS?
RTOS anvendes i vid udstrækning i bilindustrien (f.eks. motorstyring), medicinsk udstyr (f.eks. pacemakere), industriel automation (robotter), telekommunikation (routere) og luftfart (flykontrolsystemer).
Er Windows et realtids-OS?
Nej, standardversionerne af Windows er GPOS (General-Purpose Operating Systems). Selvom der findes versioner som Windows IoT, der tilbyder visse realtidsfunktioner, betragtes de ikke som ægte hårde realtidssystemer. Eksempler på ægte RTOS inkluderer FreeRTOS, VxWorks og QNX.
Hvis du vil læse andre artikler, der ligner Guide til Realtidsoperativsystemer (RTOS), kan du besøge kategorien Teknologi.