11/10/2023
Raymarine SmartPilot ST6002 er mere end blot et stykke marineelektronik; for mange sejlere er det en uundværlig del af besætningen. Denne avancerede, men brugervenlige, autopilot er designet til at styre din båd med præcision og pålidelighed, hvilket frigør dig til at fokusere på navigation, trimning af sejl eller blot nyde turen. Uanset om du er på en kort dagstur eller en langdistancekrydsning, tilbyder ST6002 en række funktioner, der øger både sikkerheden og komforten om bord. Denne artikel vil guide dig gennem alt, hvad du behøver at vide om din SmartPilot, fra den første opsætning til avanceret brug og fejlfinding.
Introduktion til SmartPilot ST6002
SmartPilot-controlleren er hjertet i dit autopilotsystem og fungerer som din primære grænseflade. Den er designet til at være en del af et SeaTalk-netværk, hvilket betyder, at den problemfrit kan kommunikere med andre Raymarine-instrumenter som GPS-plottere, vindinstrumenter og fartmålere. Denne integration er nøglen til mange af dens avancerede funktioner. Systemet opererer i fire primære tilstande, som dækker alle tænkelige sejladsforhold.
- Standby: Autopiloten er deaktiveret, og du har fuld manuel kontrol over styringen.
- Auto: Den mest grundlæggende funktion, hvor autopiloten holder en fastlåst kurs.
- Track: Autopiloten styrer båden langs en foruddefineret rute mellem waypoints fra en tilsluttet navigator.
- Wind Vane: Specielt for sejlbåde. Autopiloten styrer båden i en fast vinkel i forhold til vinden.
Systemets intelligens ligger i dets evne til at lære og tilpasse sig. Med teknologier som Advanced Steering Technology (AST) og AutoLearn (i G-modeller) kan systemet finjustere sin ydeevne til netop din båds karakteristika, hvilket sikrer optimal kursstabilitet og minimalt rorarbejde.
Forståelse af din Kontrolenhed
For at mestre din SmartPilot er det afgørende at forstå layoutet og funktionerne på ST6002-kontrolenheden. Den er designet til at være intuitiv, selv under vanskelige forhold.
Displayet og dets Informationer
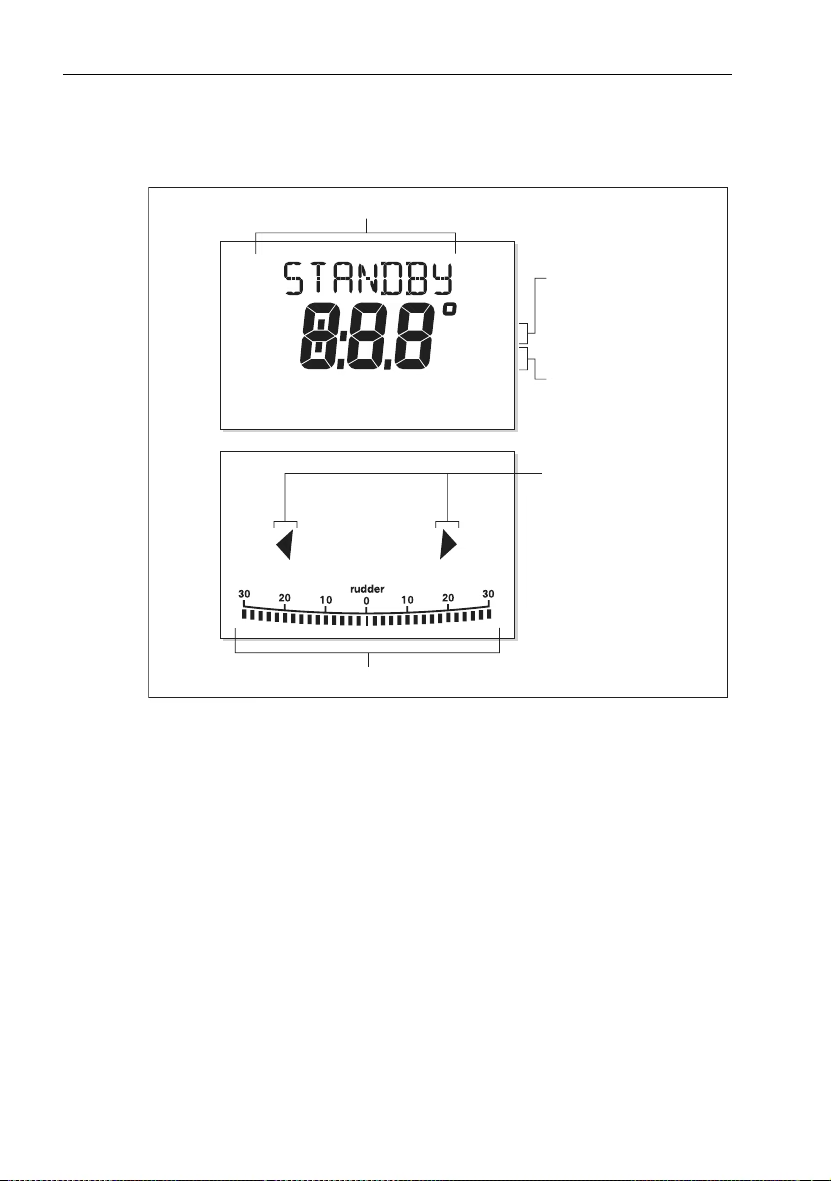
Den klare LCD-skærm giver dig et hurtigt overblik over den aktuelle status. Centralt på skærmen ser du den nuværende kurs eller den låste kurs. Derudover viser displayet:
- Tilstandsindikator: Viser tydeligt, om du er i AUTO, TRACK, WIND eller STANDBY.
- Styrbords- og bagbordsindikatorer: Små pile viser, hvilken vej autopiloten vil dreje for at korrigere kursen.
- Rorpositionsindikator: En grafisk bjælke i bunden af skærmen viser den aktuelle position af dit ror, hvilket er yderst nyttigt for at forstå, hvor meget autopiloten arbejder.
- Variabel tekstregion: Viser data fra tilsluttede instrumenter, såsom afstand til waypoint (DTW), kurs til waypoint (BTW) eller krydsfejl (XTE).
Tastaturets Funktioner
Betjeningen sker via et simpelt tastatur med baggrundsbelyste knapper for natsejlads.
- auto: Aktiverer Auto-tilstand for at holde den nuværende kurs.
- standby: Deaktiverer autopiloten og returnerer til manuel styring. Kan altid bruges som en "panikknap".
- track: Aktiverer Track-tilstand for at følge en rute fra en navigator.
- -1 / +1: Justerer den låste kurs med 1 grad til bagbord eller styrbord.
- -10 / +10: Justerer den låste kurs med 10 grader til bagbord eller styrbord.
- disp: Skifter mellem de forskellige datasider, der viser information fra andre instrumenter i netværket.
Grundlæggende Betjening: Kom Godt i Gang
At bruge SmartPilot til grundlæggende kursstyring er utrolig simpelt.
Sådan aktiverer du Auto-tilstand:
- Styr båden manuelt til den ønskede kurs.
- Tryk på auto-knappen.
- Et bip bekræfter, at autopiloten er aktiveret. Displayet vil nu vise "AUTO" og den låste kurs. Din autopilot vil nu opretholde denne kurs.
Sådan vender du tilbage til manuel styring:
Tryk blot på standby-knappen. Systemet bipper, og displayet viser "STANDBY" sammen med bådens aktuelle kompas kurs. Du har nu fuld kontrol.
Kursændringer i Auto-tilstand:
Mens du er i Auto-tilstand, kan du nemt justere kursen. For en 30-graders kursændring til bagbord skal du blot trykke på -10-knappen tre gange. Autopiloten vil roligt og kontrolleret dreje båden til den nye kurs og låse den fast.
Det er i de avancerede funktioner, at ST6002 virkelig viser sin værdi, især når den er integreret med en GPS eller kortplotter.
Følg en Rute med Track-tilstand
Track-tilstand omdanner din autopilot til en intelligent navigatør, der kan følge en kompleks rute med flere waypoints. Den kompenserer automatisk for strøm og vind (leeway) for at holde båden præcist på den planlagte rute.
For at aktivere Track-tilstand skal du først have en aktiv rute på din tilsluttede navigator. Sæt derefter autopiloten i AUTO-tilstand og tryk på track-knappen. Enheden vil vise kursen til næste waypoint og bede om bekræftelse. Tryk på track igen for at acceptere, og båden vil dreje mod det nye spor. Når du ankommer til et waypoint, vil en alarm lyde ("Waypoint Advance"), og du skal igen bekræfte kursændringen til næste waypoint ved at trykke på track. Dette er en vigtig sikkerhedsfunktion, der sikrer, at skipperen altid er opmærksom på forestående kursændringer.
Sejlads med Wind Vane-tilstand
For sejlbåde er Wind Vane-tilstand en fantastisk funktion. I stedet for at styre efter en kompas kurs, styrer autopiloten efter en fast vinkel til vinden (enten sand eller tilsyneladende vind). Dette er ideelt, da det opretholder optimal sejlføring, selvom vinden skifter en smule. For at aktivere skal du trykke standby og auto samtidigt. Du kan derefter finjustere vindvinklen med kursknapperne. Denne tilstand inkluderer også en AutoTack-funktion, hvor du ved at trykke på -1 og -10 (eller +1 og +10) sammen kan få båden til at udføre en perfekt stagvending.
Optimering af Ydeevne og Kalibrering
For at få den bedste ydeevne ud af din SmartPilot er det vigtigt at justere dens responsniveau til de aktuelle søforhold. Dette styrer balancen mellem kursnøjagtighed og mængden af roraktivitet (og dermed strømforbrug).
Du kan midlertidigt justere responsniveauet ved at trykke på -1 og +1 samtidigt for at åbne RESPONSE-menuen. Et højere niveau giver strammere kursstyring, hvilket er godt i roligt vand, mens et lavere niveau lader båden bevæge sig mere naturligt i bølger, hvilket sparer strøm og mindsker slid på styresystemet.
Sammenligning af Responsniveauer
| Systemtype | Responsniveauer | Beskrivelse |
|---|---|---|
| S1G, S2G, S3G (med Gyro) | Niveau 7-9 | Maksimal kursnøjagtighed, høj roraktivitet. Ideel til beskyttet farvand. |
| S1G, S2G, S3G (med Gyro) | Niveau 4-6 | God all-round ydeevne. Balanceret og kontrolleret under normale forhold. |
| S1G, S2G, S3G (med Gyro) | Niveau 1-3 | Minimal roraktivitet, strømbesparende. Tillader mere 'slingren' på kursen. |
| Non-G Systemer | Niveau 1 (AutoSeastate On) | Automatisk tilstand, der ignorerer repetitive bølgebevægelser. Bedste kompromis. |
| Non-G Systemer | Niveau 2 (AutoSeastate Off) | Strammere kursstyring med øget roraktivitet og strømforbrug. |
| Non-G Systemer | Niveau 3 (Yaw Damping) | Den strammeste kursstyring med brug af modror for at dæmpe krængning. |
Ud over responsniveauet findes der en række andre indstillinger under brugerkalibrering (USER CAL), som du kan tilgå ved at holde standby-knappen nede i 2 sekunder. Her kan du permanent justere standardresponsniveauet, AutoTack-vinklen og om Gybe Inhibit skal være slået til for at forhindre utilsigtede bomninger. Korrekt kalibrering er nøglen til en velfungerende autopilot.
Fejlfinding og Vedligeholdelse
Selvom Raymarine-systemer er bygget til at være pålidelige, kan der opstå problemer. En grundlæggende forståelse af fejlfinding kan spare dig for megen frustration.
Almindelige Problemer og Løsninger
| Problem | Mulig Årsag og Løsning |
|---|---|
| Displayet er blankt | Ingen strøm. Tjek sikringen til autopiloten og SeaTalk-netværket. |
| Display viser kun streger (----) | Kontrolenheden modtager ikke de nødvendige data. Tjek kabelforbindelser til kurscomputeren og andre instrumenter. |
| Båden overstyrer eller svinger for meget | Rorforstærkning (Rudder Gain) er for høj. Gennemfør en AutoLearn-procedure eller sænk gain-indstillingen manuelt. |
| Båden reagerer for langsomt | Rorforstærkning (Rudder Gain) er for lav. Øg gain-indstillingen. |
Forståelse af Alarmmeddelelser
Din navigation bliver mere sikker, når du forstår systemets alarmer.
- LOW BATTERY: Spændingen er faldet til et kritisk niveau. Start motoren for at lade batterierne op. Tryk standby for at slette alarmen.
- NO DATA: Systemet mangler vigtige data, f.eks. fra kompasset, vindinstrumentet (i Wind Vane-tilstand) eller navigatoren (i Track-tilstand). Tjek forbindelserne.
- DRIVE STOPPED: Autopiloten kan ikke dreje roret. Dette kan skyldes for højt tryk på roret (f.eks. i hårdt vejr) eller en mekanisk fejl i styresystemet.
- OFF COURSE: Båden har været mere end 20 grader ude af kurs i over 20 sekunder. Tjek sejlføring og trim.
Regelmæssig vedligeholdelse er simpel. Hold enheden ren med en fugtig klud (undgå kemikalier), og tjek jævnligt kabelforbindelser for tegn på korrosion eller slitage.
Ofte Stillede Spørgsmål (FAQ)
Hvor mange manualer findes der til Raymarine ST6002?
Der findes fem primære manualer til Raymarine SmartPilot ST6002, som er tilgængelige som gratis PDF-downloads. Disse inkluderer en betjeningsvejledning (Operating Manual), en idriftsættelsesvejledning (Commissioning Manual) og en hurtigreferenceguide (Quick Reference Manual).
Kan jeg forbinde min ST6002 til andet Raymarine udstyr?
Ja, absolut. ST6002 er designet til at fungere inden for Raymarines SeaTalk-netværk. Dette giver den mulighed for at sende og modtage data med en lang række udstyr, herunder kortplottere, GPS-modtagere, vindinstrumenter og fartlogge, for at muliggøre avancerede funktioner som Track- og Wind Vane-tilstand.
Hvad er forskellen på Auto-tilstand og Track-tilstand?
I Auto-tilstand styrer autopiloten efter en fast kompas kurs. Den tager ikke højde for afdrift på grund af vind eller strøm. I Track-tilstand styrer autopiloten mod et specifikt waypoint og justerer løbende kursen for at kompensere for strøm og vind, så båden forbliver præcist på den planlagte rute mellem to waypoints.
Hvordan justerer jeg autopilotens ydeevne i hård sø?
Den bedste måde at justere ydeevnen på er ved at ændre responsniveauet (Response Level). I hård sø bør du sænke responsniveauet. Dette vil få autopiloten til at reagere mindre aggressivt på bølgebevægelser, hvilket resulterer i en mere komfortabel sejlads, mindre slid på styresystemet og et lavere strømforbrug.
Hvad betyder "Cross Track Error" (XTE)?
Cross Track Error, eller XTE, er den vinkelrette afstand fra din båds nuværende position til den planlagte rute (sporet) mellem to waypoints. Autopiloten bruger denne information i Track-tilstand til at foretage de nødvendige kurskorrektioner for at bringe båden tilbage på sporet.
Hvis du vil læse andre artikler, der ligner Raymarine ST6002 SmartPilot: Den Komplette Guide, kan du besøge kategorien Sundhed.