06/02/2000
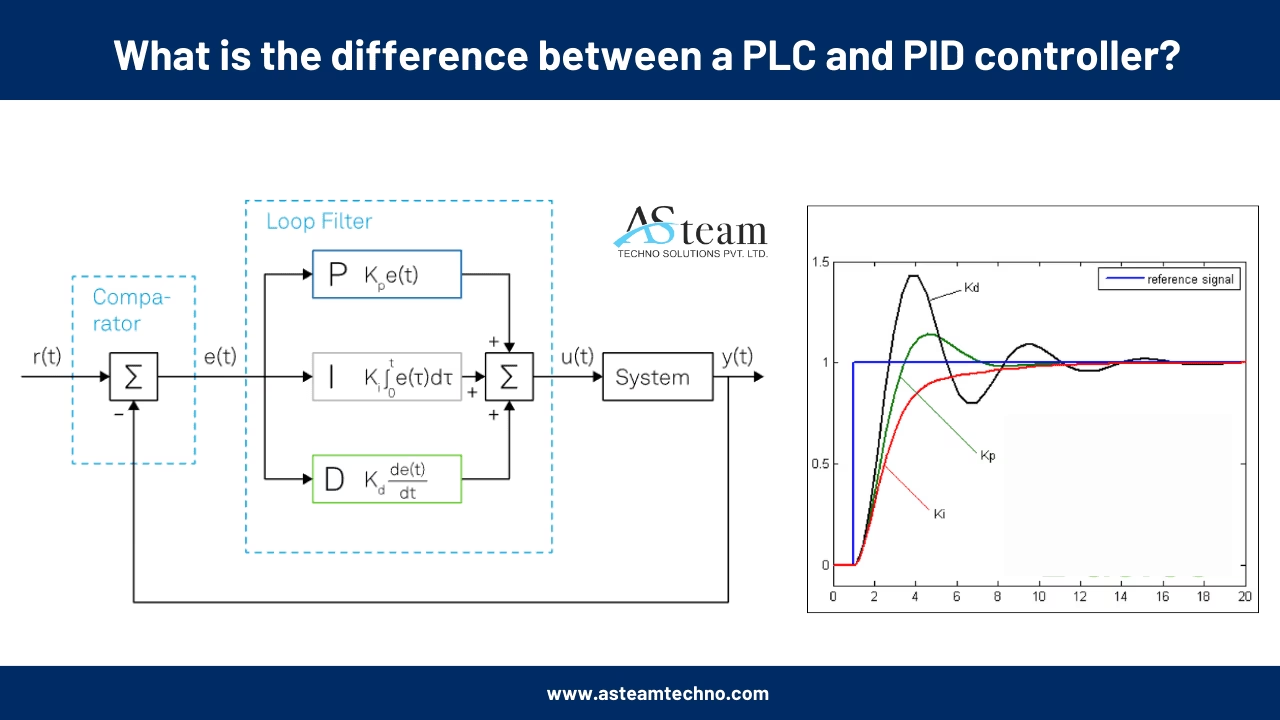
I hjertet af utallige industrielle processer, fra simple termostater til komplekse kemiske reaktorer, finder vi en uundværlig teknologi: PID-regulatoren. PID står for Proportional-Integral-Derivative, en kontrolsløjfe-feedbackmekanisme, der er kendt for sin robusthed og enkelthed. Dens primære opgave er at beregne en fejl-værdi som forskellen mellem en ønsket setpunkt-værdi (SP) og en målt procesværdi (PV) og derefter justere en output for at minimere denne fejl. Men for at en PID-regulator skal være praktisk anvendelig i den virkelige verden, skal den kunne mere end blot at udføre sin matematiske ligning. Den skal kunne interagere med den menneskelige operatør. Spørgsmålet er derfor ikke kun, hvad en PID-regulator er, men også: Kan en menneskelig operatør overstyre den, og hvorfor er det så vigtigt?
Manuel vs. Automatisk Tilstand: Når Mennesket Tager Kontrollen
Når en regulator kontinuerligt beregner output-værdier baseret på procesværdien og setpunktet, siges den at operere i automatisk tilstand. Dette er den normale driftstilstand, der er nødvendig for at regulere enhver proces. Der er dog situationer, hvor det er afgørende for en menneskelig operatør at kunne tilsidesætte den automatiske handling. Disse situationer inkluderer opstart og nedlukning af processer, nødsituationer og vedligeholdelsesprocedurer. Når en regulator bliver overstyret af et menneske, er den i manuel tilstand.
En meget almindelig anvendelse af manuel tilstand er under vedligeholdelse af en sensor eller transmitter. Hvis en instrumenttekniker skal afbryde en procestransmitter for kalibrering eller udskiftning, kan regulatoren, der modtager signalet, ikke efterlades i automatisk tilstand. Hvis den gør det, vil regulatoren sandsynligvis foretage en pludselig og potentielt farlig korrigerende handling i det øjeblik, transmitterens signal forsvinder. Ved først at placere regulatoren i manuel tilstand, vil den ignorere ændringer i PV-signalet og lade outputtet blive justeret efter operatørens ønske. Operatøren kan så bruge en alternativ indikator for procesværdien og midlertidigt agere som PID-regulator, mens teknikeren udfører sit arbejde.
Vigtigheden af Output- og Setpunkt-Tracking
Indførelsen af manuelle og automatiske tilstande skaber et potentielt problem: Hvad sker der med output-værdien, når regulatoren skiftes tilbage fra manuel til automatisk tilstand? I ældre eller mere simple regulator-designs kunne dette resultere i et øjeblikkeligt "spring" tilbage til den værdi, PID-ligningen havde beregnet, mens den var i manuel tilstand. Dette kan være ekstremt frustrerende for en operatør.
Output Tracking: En Glidende Overgang
For at løse dette problem findes en essentiel funktion kaldet output tracking. Med output tracking justeres regulatorens bias-værdi, hver gang regulatoren sættes i manuel tilstand, og output-værdien ændres manuelt. Når regulatoren derefter skiftes tilbage til automatisk tilstand, springer outputtet ikke, men fortsætter i stedet fra den sidst manuelt indstillede værdi. Dette giver operatøren mulighed for effektivt at justere udgangspunktet for den automatiske regulering.
En kritisk anvendelse af output tracking er at korrigere for integral wind-up. Dette fænomen opstår, når integral-leddet i PID-ligningen akkumulerer en stor fejl, fordi procesværdien af en eller anden grund ikke kan nå setpunktet. Et eksempel kunne være en temperaturregulator, der forsøger at varme en proces op med damp, men dampsystemet er lukket ned. Integral-leddet vil fortsætte med at øge outputtet i et forgæves forsøg på at nå setpunktet, hvilket resulterer i et mættet output (f.eks. 100%). Når dampsystemet genstartes, vil det mættede output forårsage en massiv overskridelse af setpunktet. Ved at skifte til manuel tilstand, justere outputtet ned til et fornuftigt niveau og derefter skifte tilbage til automatisk, kan operatøren forhindre dette overshoot takket være output tracking.
Setpoint Tracking: En Hjælpende Hånd ved Opstart
En lignende funktion er setpoint tracking. Formålet er at lade setpunktet (SP) følge procesværdien (PV), mens regulatoren er i manuel tilstand. Når operatøren er tilfreds med processens stabilitet og skifter tilbage til automatisk tilstand, fryses setpunktet ved den seneste værdi, PV havde. Dette sikrer en jævn overgang til automatisk kontrol uden en initial fejl. Dette er især nyttigt under opstart af komplekse systemer, hvor operatøren manuelt styrer processen til et stabilt driftspunkt, før den automatiske kontrol overtager. I modsætning til output tracking er setpoint tracking dog ikke altid ønskeligt, da man i visse processer ønsker et fast setpunkt, der ikke ændrer sig, selvom regulatoren er i manuel tilstand.
Alarmfunktioner: Systemets Digitale Vagthund
En central funktion i moderne kontrolsystemer er evnen til at advare personale om unormale procesbetingelser. Dette kaldes generelt for en alarm. Alarmer kan være "hårde alarmer", udløst af fysiske kontakter (f.eks. en højtemperaturskontakt), eller "bløde alarmer", som udløses, når en kontinuerlig måling fra en transmitter overskrider en forprogrammeret grænseværdi.
Da PID-regulatorer allerede modtager kontinuerlige procesmålinger, er det oplagt at udstyre dem med programmerbare alarmgrænser. Dette giver mulighed for bløde alarmer uden behov for yderligere instrumentering. Ud over simple høje eller lave PV-alarmer kan de fleste regulatorer også konfigureres med afvigelsesalarmer (deviation alarms). En afvigelsesalarm udløses, når forskellen mellem PV og SP bliver for stor, hvilket indikerer et problem med selve reguleringssløjfen. I moderne distribuerede kontrolsystemer (DCS) er alarmhåndtering yderst sofistikeret med tidsstempling, arkivering og avanceret analyse, hvilket er afgørende for processikkerhed og fejlfinding.
Sæt Grænser: Output- og Setpunkt-Begrænsninger
I nogle applikationer er det ikke ønskeligt at lade regulatoren manipulere det endelige kontrolelement (f.eks. en ventil eller motor) over hele dets 0-100% rækkevidde. Her kommer output-begrænsninger ind i billedet. For eksempel kan en flow-regulator have en minimums-outputgrænse på 5% for at sikre et minimumsflow gennem en pumpe og forhindre skade. Ventilen kan stadig lukkes helt i manuel tilstand, men ikke i automatisk. På samme måde kan setpunkter begrænses, så en operatør ikke kan indstille et setpunkt, der er for højt eller for lavt, hvilket kan være en sikkerhedsforanstaltning for at beskytte udstyr eller produktkvalitet.
Sikkerhed og Adgangskontrol: Hvem Må Justere Hvad?
Med så mange kritiske parametre er det nødvendigt at begrænse adgangen. Driftspersonale har brug for adgang til setpunkter og valg af auto/manuel tilstand, men det kan være uhensigtsmæssigt at give dem ubegrænset adgang til PID-tuningkonstanter eller alarmgrænser. Ligeledes har instrumentteknikere brug for adgang til tuning, men måske ikke til de overordnede konfigurationsprogrammer.
Moderne digitale PID-regulatorer har derfor sikkerhedssystemer med forskellige adgangsniveauer, ofte baseret på brugernavne og adgangskoder. Dette handler ikke om mistillid, men om ansvarsfordeling. En operatør kan have viden om en alarm, men ansvaret for at fastsætte alarmgrænserne kan ligge hos en procesingeniør, der skal sikre overholdelse af anlægsdækkende politikker. Sikkerhed sikrer, at kun de personer med det rette ansvar kan foretage ændringer i systemets kernefunktioner.
Sammenligning af Reguleringstyper
For at forstå PID-regulatorens styrke, er det nyttigt at se på, hvordan dens komponenter arbejder sammen.
| Regulatortype | Håndterer... | Fordele | Ulemper |
|---|---|---|---|
| P (Proportionel) | Nuværende fejl | Simpel, hurtig reaktion | Efterlader typisk en permanent fejl (steady-state error) |
| PI (Proportionel-Integral) | Nuværende & tidligere fejl | Eliminerer permanent fejl | Kan forårsage overshoot, langsommere end ren P |
| PID (Proportionel-Integral-Derivativ) | Nuværende, tidligere & fremtidig tendens i fejl | Hurtig, præcis, dæmper overshoot og svingninger | Følsom over for målestøj, mere kompleks at tune |
Ofte Stillede Spørgsmål (FAQ)
Hvad står PID for?
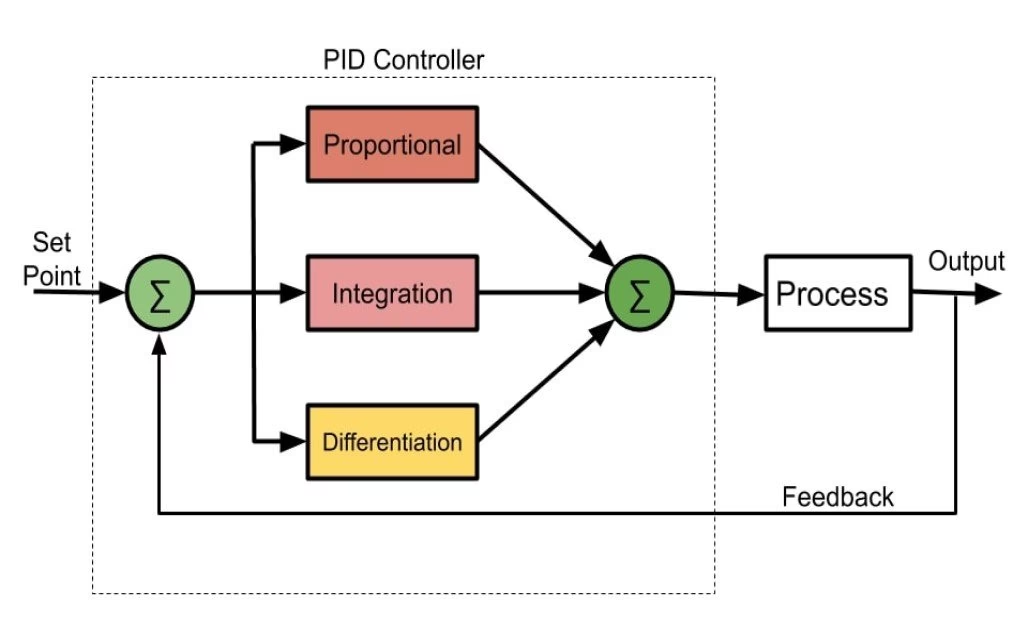
PID står for Proportional-Integral-Derivative. Det er en tre-leds algoritme, der bruges i feedback-kontrolsystemer. Den justerer et output baseret på den nuværende fejl (Proportional), den akkumulerede fejl over tid (Integral) og den hastighed, hvormed fejlen ændrer sig (Derivative).
Kan en menneskelig operatør altid overstyre en PID-regulator?
Ja, det er en fundamental funktion i næsten alle praktiske PID-regulatorer. Evnen til at skifte til manuel tilstand er afgørende for sikker drift, vedligeholdelse og håndtering af unormale situationer. Operatøren kan derefter direkte styre det endelige kontrolelement, f.eks. en ventil eller en motor.
Hvad er 'integral windup', og hvordan forhindres det?
Integral windup opstår, når integral-leddet akkumulerer en meget stor værdi, fordi regulatoren ikke kan fjerne fejlen (f.eks. på grund af en mættet aktuator). Dette fører til et stort overshoot, når processen igen bliver kontrollerbar. Det forhindres ved hjælp af anti-windup teknikker, såsom at begrænse integral-leddets værdi eller midlertidigt deaktivere det, når output er mættet. Operatørens brug af manuel tilstand og output tracking er også en måde at manuelt nulstille en 'wound-up' regulator.
Hvorfor er PID-regulering stadig så udbredt?
På trods af udviklingen af mere avancerede kontrolstrategier er PID-regulering stadig ekstremt populær på grund af sin enkelthed, effektivitet og alsidighed. Den kræver ikke en detaljeret matematisk model af systemet og kan tunes til at give fremragende ydeevne for de fleste industrielle processer. Den er let at implementere, og ingeniører verden over er fortrolige med dens principper.
Hvis du vil læse andre artikler, der ligner Kan en operatør overstyre en PID-regulator?, kan du besøge kategorien Teknologi.