18/10/2019
I moderne produktionsmiljøer er integrationen af industrirobotter afgørende for effektivitet og præcision. Men med øget automatisering følger et endnu større ansvar for sikkerheden – både for operatører og for det kostbare udstyr i cellen. KUKA.SafeOperation er en avanceret teknologi designet til netop dette formål. Det er en software- og hardwarebaseret sikkerhedsløsning, der overvåger robottens bevægelser i realtid. Men implementeringen af en så kraftfuld funktion bringer ofte komplekse spørgsmål med sig. Hvordan beskytter man mekaniske forhindringer uden at dræbe cyklustiden? Hvordan integrerer man eksterne sikkerhedsenheder som gulvscannere for at skabe dynamiske og sikre arbejdszoner for mennesker? Denne artikel dykker ned i de praktiske udfordringer og bedste praksisser ved brug af KUKA.SafeOperation, baseret på reelle brugererfaringer.
Hvad er KUKA.SafeOperation? En dybere forståelse
KUKA.SafeOperation er mere end blot en simpel softwarefunktion; det er et certificeret sikkerhedssystem, der er integreret dybt i robottens styring (KRC4 og nyere). Dets primære formål er at skabe et sikkert samarbejde mellem robot, menneske og maskine ved at overvåge og begrænse robottens arbejdsområde og hastighed. Systemet fungerer ved hjælp af to separate kanaler i styringen, der konstant krydstjekker robottens faktiske position og hastighed med de definerede sikkerhedsgrænser. Hvis der opdages en afvigelse, eller hvis robotten er ved at overskride en grænse, udløses et sikkert stop.
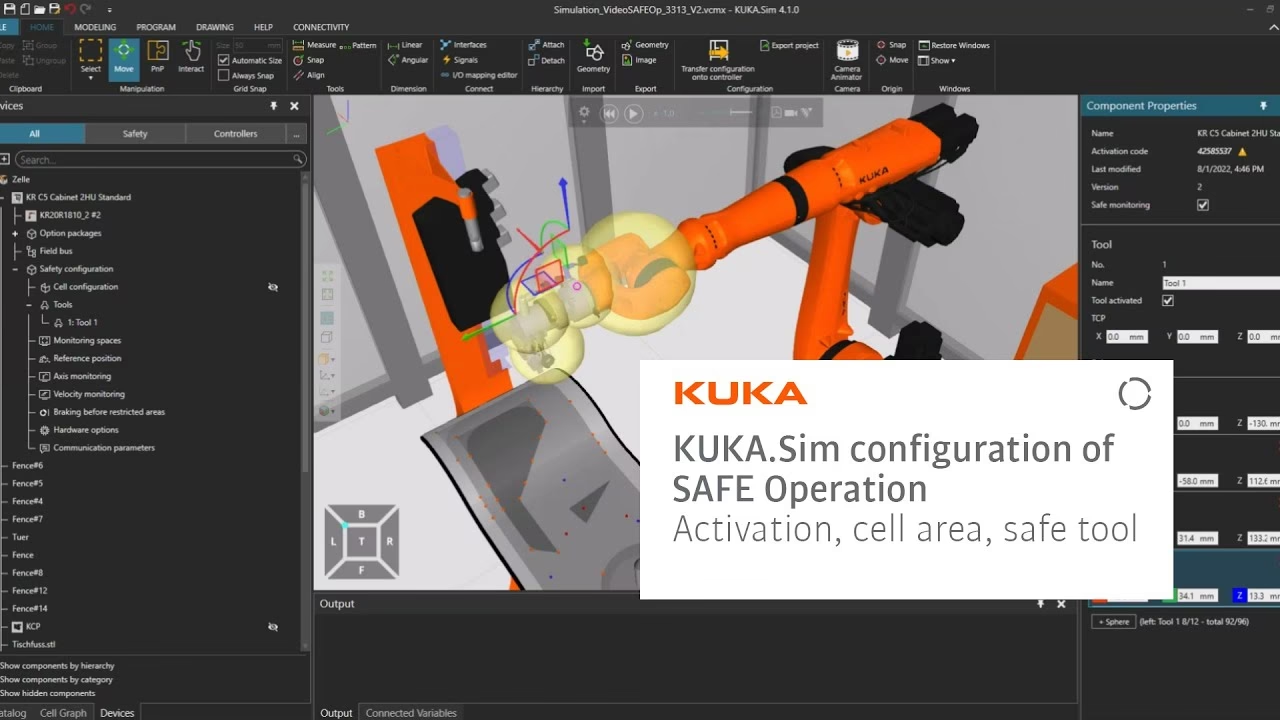
Kernen i konfigurationen, som typisk udføres i softwaren WorkVisual, er definitionen af forskellige rum og zoner:
- Arbejdsområder (Workspaces): Disse definerer de områder, hvor robotten må operere. Hvis robotten forsøger at bevæge sig uden for et defineret arbejdsområde, vil systemet gribe ind.
- Beskyttede områder (Protected Spaces): Disse er "no-go" zoner. De definerer rum, hvor robotten aldrig må bevæge sig ind. Dette er ideelt til at beskytte faste installationer som søjler, transportbånd, kontrolpaneler eller andet kritisk udstyr i cellen.
- Værktøjsovervågning (Tool Monitoring): Udover robottens arm kan SafeOperation også overvåge positionen af det monterede værktøj (TCP - Tool Center Point). Dette er afgørende, da det ofte er værktøjet, der interagerer med omgivelserne.
Disse zoner kan være permanent aktive eller aktiveres dynamisk via sikre input fra eksterne enheder som lysgitre, sikkerhedslåger eller gulvscannere. Dette åbner op for avancerede applikationer, hvor en zone kun er aktiv, når en operatør befinder sig i nærheden, hvilket giver en fleksibel balance mellem produktivitet og maskinsikkerhed.
Udfordringen: Cyklustid vs. Sikkerhed
En af de mest almindelige udfordringer, som brugere af KUKA.SafeOperation støder på, er den tilsyneladende konflikt mellem at opretholde en hurtig cyklustid og samtidig overholde strenge sikkerhedsgrænser. Problemet manifesterer sig ofte som advarslen "KSS00470 - Safe robot override reduction active". Denne advarsel betyder, at robotstyringen proaktivt reducerer robottens hastighed og acceleration, fordi den nærmer sig en defineret sikkerhedsgrænse.
Hvorfor sker dette? Sikkerhedssystemet skal garantere, at robotten kan nå at stoppe før den krydser grænsen til et beskyttet område, selv ved maksimal hastighed. Bremselængden afhænger af hastigheden. Jo hurtigere robotten kører, jo længere er dens bremselængde. Derfor beregner SafeOperation en usynlig "bufferzone" inden for det tilladte område. Når robotten kommer ind i denne bufferzone, begynder den at reducere hastigheden for at sikre, at et sikkert stop er muligt. Dette er en fundamental og tilsigtet del af sikkerhedsfunktionen.
Nogle brugere opdager parameteren $SR_VEL_RED i maskindatafilerne og overvejer at sætte den til FALSE for at deaktivere denne funktion. Det er dog ekstremt vigtigt at understrege, at det er en høj sikkerhedsrisiko at ændre i maskindata uden fuld forståelse for konsekvenserne og uden en grundig risikovurdering. Disse parametre er en del af robottens certificerede sikkerhed. At deaktivere dem kan ugyldiggøre sikkerhedscertificeringen og i værste fald føre til alvorlige kollisioner. I stedet for at modificere systemets kerneadfærd, bør man overveje alternative strategier.
Strategier til Optimering af Cyklustid med SafeOperation
Her er en sammenligning af forskellige metoder til at håndtere balancen mellem hastighed og sikkerhed:
| Metode | Fordele | Ulemper / Risici | Anbefaling |
|---|---|---|---|
Ændre $SR_VEL_RED | Fjerner potentielt hastighedsreduktion. | Meget høj sikkerhedsrisiko. Ugyldiggør sikkerhedsfunktionens grundlag. Kan føre til kollisioner, da robotten ikke kan nå at stoppe. | Anbefales på det kraftigste ikke. Må kun overvejes af certificerede eksperter efter en komplet ny risikovurdering. |
| Formindske beskyttede zoner | Giver robotten mere plads at bevæge sig på ved høj hastighed. | Hele formålet med zonen kan gå tabt, hvis den ikke længere dækker det udstyr, den skal beskytte. | Anvendeligt, men kræver præcision. Zonen skal være så lille som muligt, men så stor som nødvendigt. |
| Optimere robotbaner | Ingen ændring i sikkerhedskonfigurationen. Forbedrer cyklustiden. | Kan være tidskrævende at programmere. Kræver god forståelse for robottens kinematik. | Bedste praksis. Programmer bevægelser, så de foregår parallelt med sikkerhedszoner i stedet for direkte imod dem, hvor det er muligt. |
| Bruge dynamiske zoner | Zoner kan deaktiveres, når der ikke er fare, hvilket tillader fuld hastighed. | Kræver ekstra logik og potentielt eksternt udstyr. Kompleksiteten i sikkerhedssystemet øges. | God løsning til avancerede applikationer, hvor interaktionen med omgivelserne ændrer sig. |
Integration med Eksterne Sikkerhedsenheder som Gulvscannere
En anden kraftfuld anvendelse af KUKA.SafeOperation er at skabe celler, hvor mennesker og robotter kan arbejde tættere sammen. Dette opnås ofte ved at integrere sikkerhedsscannere, der overvåger gulvarealet omkring robotten. Konceptet er typisk at definere flere zoner:
- Advarselszone (Warning Zone): Når en person træder ind i denne ydre zone, sender scanneren et signal til robotstyringen. Dette signal bruges ikke til at udløse et sikkert stop, men til at aktivere en sikkerhedsfunktion, der reducerer robottens hastighed til et sikkert niveau (f.eks. Safe Reduced Velocity). Robotten fortsætter sit arbejde, men langsommere.
- Stopzone (Stop Zone): Hvis personen fortsætter ind i den indre zone tættere på robotten, sender scanneren et andet signal. Dette signal udløser et sikkert stop (f.eks. Stop 1 eller Stop 0), som bringer robotten til standsning øjeblikkeligt og sikkert.
Implementeringen er ikke så simpel som blot at tegne zonerne i scannerens software. Det kræver en omhyggelig konfiguration i WorkVisual. De sikre udgange (OSSD'er) fra scanneren skal forbindes til de sikre indgange på robotstyringen (f.eks. på en X11- eller X13-grænseflade). Derefter skal man i WorkVisual's sikkerhedskonfiguration mappe disse indgange til specifikke sikkerhedsfunktioner. For eksempel kan indgangen fra advarselszonen aktivere funktionen "Safe Velocity Monitoring", mens indgangen fra stopzonen aktiverer en global stopfunktion. Det er vigtigt at forstå, at selve sikkerhedsreaktionen (hastighedsreduktion og stop) håndteres af den sikre del af styringen, ikke af det almindelige KRL-robotprogram. KRL-programmet kan dog informeres om tilstanden og f.eks. pause en sekvens, så den kan genoptages elegant, når zonen er fri igen.
Et centralt spørgsmål er, om robotten kan genoptage sit arbejde automatisk, når personen forlader zonen. Svaret er næsten altid nej. Internationale sikkerhedsstandarder (som ISO 10218) kræver typisk en bevidst handling, f.eks. et tryk på en reset-knap, for at genstarte bevægelse efter et beskyttende stop. Dette er for at forhindre uventet opstart, som kan være farligt, hvis en person stadig er i farezonen, men midlertidigt uden for scannerens synsfelt. Dette princip er afgørende for design af sikre systemer til samarbejdende robotter.
Ofte Stillede Spørgsmål (OSS)
Kan jeg slå hastighedsreduktionen fra for at gøre robotten hurtigere?
Det frarådes på det kraftigste at deaktivere den indbyggede hastighedsreduktion ved at ændre systemparametre som $SR_VEL_RED. Denne funktion er en fundamental del af sikkerhedssystemets evne til at garantere et stop før en kollision. At deaktivere den underminerer hele sikkerhedskonceptet. Fokuser i stedet på at optimere robotbaner og zonestørrelser.
Kræver integration af en gulvscanner programmering i KRL?
Selve den sikkerhedsrelaterede reaktion (stop eller hastighedsreduktion) konfigureres udelukkende i WorkVisual og håndteres af den dedikerede sikkerhedsstyring. Det kræver ikke KRL-programmering. Dog kan det være god praksis at bruge KRL til at håndtere selve programflowet – f.eks. at pause en opgave, når der er en advarselszone aktiv, og genoptage den, når zonen er klar, efter en manuel kvittering. Dette skaber en mere robust og brugervenlig applikation.
Kan robotten automatisk genoptage sit arbejde, når en person forlader sikkerhedszonen?
Nej, generelt set ikke. Sikkerhedsstandarder kræver en manuel genstart (kvittering) efter et beskyttende stop for at sikre, at operatøren har fuld kontrol og bevidst genstarter systemet. Dette forhindrer uventede bevægelser og er en hjørnesten i sikker maskindrift. En automatisk genstart ville udgøre en betydelig risiko.
Hvis du vil læse andre artikler, der ligner KUKA SafeOperation: Sikkerhed vs. Ydeevne, kan du besøge kategorien Sundhed.