15/05/2003
I en verden, der bliver mere og mere automatiseret, er evnen for maskiner til at navigere selvstændigt i komplekse miljøer blevet en hjørnesten i teknologisk innovation. Fra selvkørende biler til droner, der leverer pakker, og landbrugsrobotter, der plejer afgrøder, er behovet for præcis og pålidelig navigation altafgørende. Kernen i mange af disse systemer er et kraftfuldt framework kendt som Robot Operating System (ROS). Denne artikel vil dykke ned i, hvordan ROS, kombineret med GPS-teknologi, giver robotter mulighed for at forstå deres omgivelser, planlægge ruter og udføre opgaver med en imponerende grad af autonomi. Vi vil udforske de essentielle softwarepakker, den nødvendige hardware og de metoder, der anvendes til at omdanne en simpel maskine til en intelligent, navigerende enhed.
Hvad er Robot Operating System (ROS)?
Selvom navnet indeholder "Operating System", er ROS ikke et traditionelt operativsystem som Windows eller macOS. Det er snarere et fleksibelt og modulært framework designet specifikt til udvikling af robotsoftware. ROS tilbyder et sæt af værktøjer, biblioteker og konventioner, der sigter mod at forenkle opgaven med at skabe kompleks og robust robotadfærd på tværs af en bred vifte af robotplatforme. Det fungerer som et mellemlag (middleware), der håndterer kommunikationen mellem forskellige processer, kendt som "noder" i ROS-terminologi.
Hver node er ansvarlig for en specifik opgave, såsom at læse data fra en sensor, styre motorer eller planlægge en rute. Disse noder kan kommunikere med hinanden ved at publicere og abonnere på meddelelser via emner ("topics"). Denne decentraliserede og meddelelsesbaserede arkitektur gør ROS utroligt skalerbart og genanvendeligt. En udvikler kan nemt kombinere eksisterende noder fra det store open source-fællesskab med sine egne specialiserede noder for at bygge et komplet robotsystem. Denne modularitet er en af de primære årsager til ROS' udbredte popularitet inden for både akademisk forskning og kommerciel udvikling.
For at en robot kan navigere autonomt ved hjælp af GPS, kræves der et samspil mellem flere specialiserede ROS-pakker. Disse pakker håndterer alt fra sensorfortolkning til beslutningstagning på højt niveau. Lad os se nærmere på de mest centrale komponenter i et typisk autonom navigation-setup.
Sensorfusion med ekf_localization
En enkelt sensor er sjældent nok til at give en robust og præcis positionsbestemmelse. GPS kan være upræcis i byområder, hjulenes omdrejningstællere (odometri) driver over tid, og et inertimålingsenhed (IMU) kan have bias. Her kommer sensorfusion ind i billedet. ekf_localization-noden, en del af robot_localization-pakken, anvender et Extended Kalman Filter (EKF) til at smelte data fra flere sensorer (f.eks. IMU, odometri og GPS) sammen. Resultatet er et langt mere pålideligt og nøjagtigt estimat af robottens position og orientering, end nogen enkelt sensor kunne levere alene.
GPS giver en global position i form af bredde- og længdegrad, men robottens interne navigationssystemer opererer typisk i et lokalt kartesisk koordinatsystem (x, y, z) med udgangspunkt i robottens startposition. navsat_transform-noden bygger bro mellem disse to verdener. Den tager GPS-data og fusionerede odometridata for at transformere de globale GPS-koordinater til robottens lokale 'map' eller 'odom' ramme. Dette er afgørende for, at navigationsstakken kan bruge GPS-data til at sætte mål og korrigere robottens position på det lokale kort.
Kortlægning og Forhindringsdetektion med GMapping
Før en robot kan navigere i et område, har den brug for et kort. GMapping er en populær ROS-pakke, der implementerer en SLAM-algoritme (Simultaneous Localization and Mapping). Ved hjælp af data fra en afstandsmåler som en Lidar, kan GMapping bygge et 2D-kort over omgivelserne, samtidig med at den holder styr på robottens position inden for det kort, den er ved at skabe. Dette kort bruges ikke kun til at finde vej, men også til at identificere forhindringer i realtid, som robotten skal undgå.
Ruteplanlægning og Udførelse med move_base
move_base er hjertet i ROS' navigationsstak. Denne pakke forbinder alle de andre komponenter for at opnå autonom bevægelse. Når den modtager et mål (f.eks. et konverteret GPS-waypoint), bruger den en global planlægger til at finde den optimale rute fra robottens nuværende position til målet på det kendte kort. Derefter overtager en lokal planlægger, som genererer de faktiske motorstyringskommandoer for at følge den globale rute, mens den konstant reagerer på og undgår uforudsete forhindringer, der opdages af sensorerne.
Her er en oversigt over de nævnte pakker og deres funktioner:
| ROS Pakke | Primær Funktion | Input Data | Output Data |
|---|---|---|---|
ekf_localization | Sensorfusion for præcis positionsestimering | GPS, IMU, Hjul-odometri | Filtreret odometri-meddelelse |
navsat_transform | Konverterer GPS-koordinater til lokalt system | GPS-data, filtreret odometri | GPS-position i robottens 'map' ramme |
GMapping | Bygger 2D-kort og lokaliserer robotten (SLAM) | Lidar-scanninger, odometri | Et 2D-kort over miljøet |
move_base | Højniveau navigation og ruteplanlægning | Målposition, kort, sensordata | Hastighedskommandoer til motorerne |
Opnå Centimeterpræcision med RTK GPS
Standard GPS-modtagere, som dem man finder i en smartphone, har typisk en nøjagtighed på omkring 2-5 meter. Selvom dette er imponerende, er det utilstrækkeligt for applikationer, der kræver ekstrem præcision, såsom landbrug, opmåling eller automatiseret plæneklipning. Her kommer RTK (Real-Time Kinematic) GPS-teknologien til undsætning.
RTK forbedrer positionsnøjagtigheden dramatisk ved at anvende korrektionsdata fra en fast referencestation. Denne basestation, hvis position er kendt med millimeterpræcision, modtager de samme satellitsignaler som robotten (kaldet "rover"). Ved at sammenligne de modtagne signaler med sin kendte position, kan basestationen beregne fejlene i satellitsignalerne forårsaget af atmosfæriske forstyrrelser. Disse korrektionsdata sendes derefter i realtid til roveren, som bruger dem til at korrigere sin egen positionsberegning. Resultatet er en forbløffende nøjagtighed, ofte helt ned til 1-2 centimeter. Integrationen af en RTK GPS-modtager, som f.eks. Sparkfun ZED-F9P, i et ROS-system kan løfte en robots navigationskapaciteter til et professionelt niveau.
Visualisering: Et Vigtigt Værktøj for Udvikleren
At udvikle og fejlfinde et komplekst autonomt system uden at kunne se, hvad robotten "tænker", er næsten umuligt. ROS tilbyder flere kraftfulde visualiseringsværktøjer, der giver udviklere et vindue ind til robottens verden.
- Mapviz: Et specialiseret 2D-visualiseringsværktøj, der er fremragende til at vise georeferencerede data. Det kan vise robottens GPS-spor, planlagte ruter og sensor-data oven på et satellit- eller vejkort, hvilket giver en intuitiv forståelse af robottens adfærd i den virkelige verden.
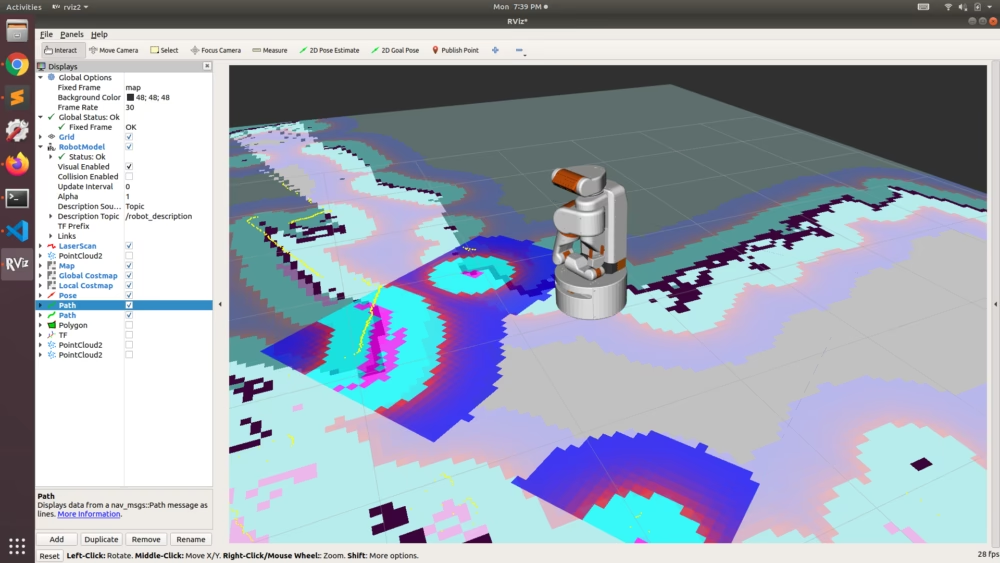
- RViz (med Rviz Satellite plugin): RViz er ROS' primære 3D-visualiseringsværktøj. Det kan vise en model af robotten, sensordata som Lidar-punktskyer, det byggede kort, planlagte stier og meget mere. Med `rviz_satellite`-pluginnet kan man, ligesom i Mapviz, tilføje en satellitkortbaggrund for at give kontekst til robottens position.
- Rosboard: Et moderne, web-baseret værktøj, der giver mulighed for at visualisere ROS-emner direkte i en webbrowser. Dette er især nyttigt for hurtig fejlfinding og overvågning af robotten fra en computer, tablet eller endda en telefon på det samme netværk, uden at skulle installere tung software.
Ofte Stillede Spørgsmål (FAQ)
Hvad er forskellen på almindelig GPS og RTK GPS?
Den primære forskel er nøjagtigheden. Almindelig GPS har en nøjagtighed på flere meter, mens RTK GPS kan opnå centimeterpræcision. Dette opnås ved, at RTK-systemet bruger en fast basestation til at sende korrektionsdata til den mobile modtager (roveren) for at eliminere atmosfæriske og andre fejl i GPS-signalet.
Er ROS svært at lære for en nybegynder?
ROS har en relativt stejl indlæringskurve på grund af dets mange koncepter og kommandolinjeværktøjer. Men det enorme online fællesskab, den omfattende officielle dokumentation (ROS Wiki) og utallige tutorials gør det muligt for selv begyndere at komme i gang. At starte med en simuleret robot er en god måde at lære det grundlæggende på, før man går videre til fysisk hardware.
Ingen enkelt sensor er perfekt. GPS kan miste signal, hjul kan glide (hvilket forårsager odometriskift), og IMU'er kan have støj. Ved at fusionere data fra flere forskellige sensorer kan et system som et Kalman-filter kompensere for de individuelle sensorers svagheder. Dette resulterer i et positionsestimat, der er langt mere robust, kontinuerligt og præcist end summen af dets dele, hvilket er afgørende for sikker og pålidelig autonom navigation.
Nej, GPS-signaler er generelt for svage og upålidelige til at trænge igennem bygninger. Indendørs navigation kræver andre lokaliseringsteknikker, såsom SLAM ved hjælp af Lidar eller kameraer, Wi-Fi-positionering eller beacons. ROS understøtter fuldt ud disse metoder, men de er adskilt fra GPS-baseret navigation.
Sammenfattende tilbyder Robot Operating System et utroligt kraftfuldt og fleksibelt økosystem til at bygge sofistikerede robotter. Ved at kombinere velprøvede pakker til kortlægning, lokalisering og planlægning med præcise sensordata fra teknologier som RTK GPS, er det i dag muligt for både hobbyister og professionelle at skabe robotter, der kan navigere komplekse udendørs miljøer med en imponerende grad af intelligens og præcision.
Hvis du vil læse andre artikler, der ligner Autonom Robotnavigation med ROS og GPS, kan du besøge kategorien Sundhed.