10/01/2004
I en verden af matematik, fysik og computervidenskab er evnen til at transformere objekter og data fundamental. Lineær algebra giver os et utroligt stærkt værktøj til dette: den lineære transformation. Men hvordan repræsenterer vi disse ofte komplekse operationer på en enkel og beregningsvenlig måde? Svaret ligger i et koncept kendt som standardmatrixen. For enhver lineær transformation, der flytter vektorer fra ét rum til et andet, findes der en unik matrix, der udfører præcis den samme opgave. At anvende transformationen bliver så simpelt som at multiplicere med denne matrix. Denne artikel vil guide dig igennem alt, hvad du behøver at vide om standardmatrixen, fra hvad den er, til hvordan du finder den og anvender den i praksis.
Hvad er en Lineær Transformation?
Før vi kan dykke ned i standardmatrixen, må vi først forstå, hvad en lineær transformation er. En funktion eller afbildning T, der tager en vektor fra et vektorrum Rⁿ (domænet) til et andet vektorrum Rᵐ (codomænet), kaldes lineær, hvis den opfylder to afgørende betingelser for alle vektorer u og v i Rⁿ og enhver skalar c:
- Additivitet: T(u + v) = T(u) + T(v) (Transformationen af en sum er summen af transformationerne)
- Homogenitet: T(cu) = cT(u) (Transformationen af en skaleret vektor er den skalerede transformation af vektoren)
Disse egenskaber betyder, at transformationen bevarer strukturen i vektorrummet; den bevarer operationerne addition og skalarmultiplikation. Eksempler på lineære transformationer inkluderer rotationer, refleksioner (spejlinger), skaleringer og projektioner. En simpel translation (forskydning), T(x) = x + b, er derimod ikke en lineær transformation, da den ikke bevarer nulvektoren.
Standardmatrixens Rolle: Fra Regel til Multiplikation
Det geniale ved lineære transformationer er, at de kan repræsenteres af matricer. For en given lineær transformation T: Rⁿ → Rᵐ findes der en unik m x n matrix A, således at for enhver vektor x i Rⁿ gælder:
T(x) = Ax
Denne matrix A kaldes standardmatrixen for den lineære transformation T. Dette er ekstremt nyttigt, da det omdanner en potentielt kompleks procedure til en standardiseret matrix-vektor-multiplikation, som er let at udføre for computere og let at analysere matematisk.
Nøglen: Standardbasisvektorer
Hvordan finder vi så denne magiske matrix? Hemmeligheden ligger i at observere, hvad transformationen gør ved de simpleste byggesten i vores domæne: standardbasisvektorerne. En standardbasis for Rⁿ er en samling af n vektorer, hvor hver vektor har et 1-tal på én position og 0-taller på alle andre.
For R² er standardbasen:
e₁ = [1, 0]ᵀ, e₂ = [0, 1]ᵀ
For R³ er standardbasen:
e₁ = [1, 0, 0]ᵀ, e₂ = [0, 1, 0]ᵀ, e₃ = [0, 0, 1]ᵀ
Den fundamentale sætning siger, at søjlerne i standardmatrixen A er billederne af standardbasisvektorerne under transformationen T. Med andre ord:
A = [ T(e₁) T(e₂) ... T(eₙ) ]
Hver T(eᵢ) er en vektor i Rᵐ og udgør den i'te søjle i matrixen A.
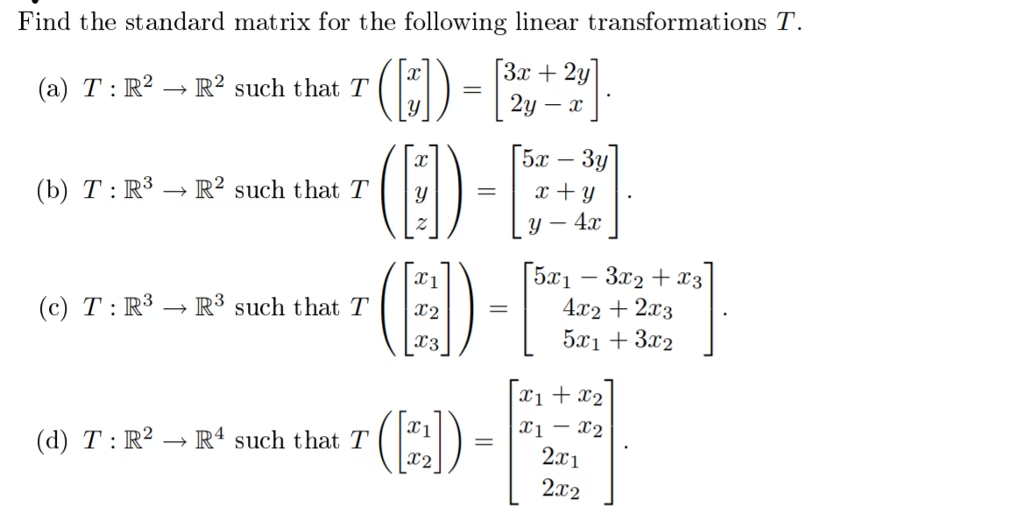
Sådan Finder du Standardmatrixen: En Trin-for-Trin Guide
At finde standardmatrixen kan koges ned til en simpel opskrift:
- Identificer Domæne og Codomæne: Bestem n og m for transformationen T: Rⁿ → Rᵐ. Dette fortæller dig dimensionerne på din matrix (m rækker, n søjler).
- Find Standardbasis: Opskriv standardbasisvektorerne (e₁, e₂, ..., eₙ) for domænet Rⁿ.
- Transformer Basisvektorerne: Anvend transformationsreglen T på hver enkelt basisvektor for at finde deres billedvektorer: T(e₁), T(e₂), ..., T(eₙ).
- Konstruer Matrixen: Placer de fundne billedvektorer som søjler i din matrix A. Den første søjle er T(e₁), den anden er T(e₂), og så videre.
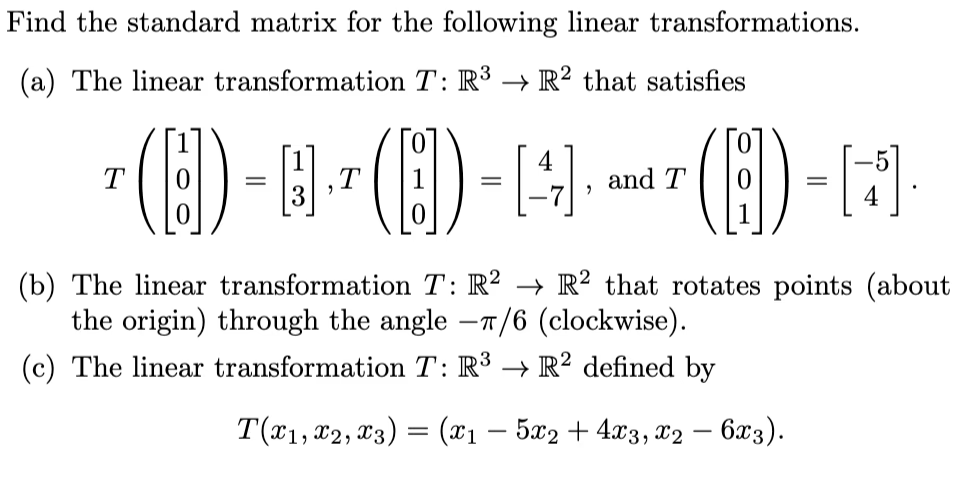
Gennemgang af et Eksempel
Lad os finde standardmatrixen for transformationen T: R³ → R², der er defineret ved:
T( [x₁, x₂, x₃]ᵀ ) = [x₁ - x₂, 2x₃]ᵀ
Trin 1: Domænet er R³, så n=3. Codomænet er R², så m=2. Vores standardmatrix A vil være en 2x3 matrix.
Trin 2: Standardbasis for R³ er e₁ = [1, 0, 0]ᵀ, e₂ = [0, 1, 0]ᵀ, og e₃ = [0, 0, 1]ᵀ.
Trin 3: Vi transformerer hver basisvektor:
- T(e₁) = T([1, 0, 0]ᵀ) = [1 - 0, 2*0]ᵀ = [1, 0]ᵀ
- T(e₂) = T([0, 1, 0]ᵀ) = [0 - 1, 2*0]ᵀ = [-1, 0]ᵀ
- T(e₃) = T([0, 0, 1]ᵀ) = [0 - 0, 2*1]ᵀ = [0, 2]ᵀ
Trin 4: Vi konstruerer matrixen A ved at bruge disse resultater som søjler:
A = [ [1, 0]ᵀ [-1, 0]ᵀ [0, 2]ᵀ ] = [[1, -1, 0], [0, 0, 2]]
Verifikation: Virker det?
Vi kan nemt tjekke vores resultat. Hvis A er korrekt, skal Ax give det samme som T(x) for en vilkårlig vektor x = [x₁, x₂, x₃]ᵀ.
Ax = [[1, -1, 0], [0, 0, 2]] * [x₁, x₂, x₃]ᵀ = [1*x₁ + (-1)*x₂ + 0*x₃, 0*x₁ + 0*x₂ + 2*x₃]ᵀ = [x₁ - x₂, 2x₃]ᵀ
Dette er præcis den oprindelige regel for T. Vores standardmatrix er korrekt!
Typiske Transformationer og Deres Matricer
Mange geometriske operationer i 2D er lineære transformationer. Her er en tabel over nogle af de mest almindelige og deres standardmatricer i R².
| Transformationstype | Beskrivelse | Standardmatrix i R² |
|---|---|---|
| Rotation (vinkel θ) | Roterer en vektor mod uret om origo. | [[cos(θ), -sin(θ)], [sin(θ), cos(θ)]] |
| Refleksion (x-akse) | Spejler en vektor over x-aksen. | [[1, 0], [0, -1]] |
| Refleksion (y-akse) | Spejler en vektor over y-aksen. | [[-1, 0], [0, 1]] |
| Projektion (x-akse) | Projicerer en vektor ned på x-aksen. | [[1, 0], [0, 0]] |
| Skalering (faktorer k₁, k₂) | Strækker/komprimerer langs akserne. | [[k₁, 0], [0, k₂]] |
Ofte Stillede Spørgsmål (FAQ)
Hvorfor kaldes det en "standard" matrix?
Den kaldes "standard", fordi den er unikt bestemt ud fra den mest almindelige og simple basis, nemlig standardbasen. Hvis man valgte en anden basis for sit vektorrum, ville den samme lineære transformation blive repræsenteret af en anden matrix.
Er enhver matrix en standardmatrix for en lineær transformation?
Ja. Enhver m x n matrix A definerer en lineær transformation T: Rⁿ → Rᵐ givet ved reglen T(x) = Ax. Man kan vise, at denne afbildning altid opfylder betingelserne for linearitet.
Hvad sker der, hvis en transformation ikke er lineær?
Hvis en transformation ikke er lineær, kan den ikke repræsenteres af en enkelt standardmatrix. For eksempel er en translation (forskydning) ikke lineær og kræver andre metoder (såsom affine transformationer og homogene koordinater) for at blive repræsenteret med matrixmultiplikation, hvilket ofte ses i computergrafik.
Hvor bruges dette i den virkelige verden?
Standardmatricer og lineære transformationer er fundamentale i utallige felter. I computergrafik bruges de til at rotere, skalere og transformere 3D-modeller. I fysik bruges de til at beskrive systemers opførsel og til at skifte koordinatsystem. I dataanalyse og maskinlæring bruges de i teknikker som Principal Component Analysis (PCA) til at reducere dimensionaliteten af data.
At mestre konceptet om standardmatrixen er at bygge en bro mellem den abstrakte idé om en transformation og den konkrete, beregnelige verden af matrixalgebra. Det er et essentielt værktøj, der simplificerer komplekse problemer og åbner døren til en dybere forståelse af de matematiske strukturer, der former vores verden.
Hvis du vil læse andre artikler, der ligner Standardmatrix: En Komplet Guide til Transformationer, kan du besøge kategorien Sundhed.