18/01/2002
I en verden af lineær algebra og numerisk analyse er der mange værktøjer til at nedbryde komplekse problemer til mere håndterbare dele. En af de mest elegante og effektive metoder til håndtering af en specifik type matrix er Cholesky-faktorisering. Denne metode, opkaldt efter den franske matematiker André-Louis Cholesky, er en fundamental teknik inden for områder som statistik, optimering og maskinlæring. Den tilbyder en numerisk stabil og beregningsmæssigt effektiv måde at dekomponere symmetriske, positiv-definite matricer på, hvilket åbner døren for løsninger på en lang række praktiske problemer.
Hvad er Cholesky-faktorisering?
Grundlæggende er Cholesky-faktorisering en dekomponering af en matrix til produktet af en nedre triangulær matrix og dens transponerede. Teoremet bag denne metode, kendt som Cholesky-faktoriseringsteoremet, kan formuleres således: Hvis en matrix A er symmetrisk og positiv-definit, så findes der en unik nedre triangulær matrix L med positive diagonalelementer, således at:
A = LLᵀ
Lad os bryde disse begreber ned:
- Symmetrisk matrix: En matrix er symmetrisk, hvis den er lig med sin egen transponerede. Det betyder, at elementet i række i, kolonne j er det samme som elementet i række j, kolonne i (aᵢⱼ = aⱼᵢ).
- Positiv-definit matrix: En symmetrisk matrix A er positiv-definit, hvis for enhver ikke-nul vektor x, er resultatet af xᵀAx et positivt tal. Intuitivt betyder det, at matricen repræsenterer en transformation, der altid peger i en retning, der har en positiv projektion på den oprindelige vektor. Alle egenværdier af en positiv-definit matrix er positive.
- Nedre triangulær matrix (L): En matrix, hvor alle elementer over hoveddiagonalen er nul.
- Transponeret matrix (Lᵀ): Matricen L, hvor rækker og kolonner er byttet om. Den transponerede af en nedre triangulær matrix er en øvre triangulær matrix.
Matrixen L kaldes for Cholesky-faktoren af A. At finde denne faktor er selve målet med faktoriseringen. Fordi L er triangulær, er den meget lettere at arbejde med i beregninger, især når det kommer til at løse lineære ligningssystemer.
Hvordan beregnes Cholesky-faktoren?
Beregningen af Cholesky-faktoren L udføres element for element. For en n-dimensionel matrix A, kan vi udlede formlerne for elementerne Lᵢⱼ i den nedre triangulære matrix L. Processen er iterativ og bygger på allerede beregnede værdier.
Formlerne for elementerne i L er som følger:
For diagonalelementerne (hvor i = j):
Lᵢᵢ = √(Aᵢᵢ - Σₖ₌₁ⁱ⁻¹ L²ᵢₖ)
For elementerne under diagonalen (hvor i > j):
Lᵢⱼ = (1 / Lⱼⱼ) * (Aᵢⱼ - Σₖ₌₁ʲ⁻¹ Lᵢₖ * Lⱼₖ)
Selvom disse formler kan se komplicerede ud, følger beregningen en logisk rækkefølge. Man beregner elementerne i L kolonne for kolonne, fra venstre mod højre. Inden for hver kolonne beregnes diagonalelementet først, efterfulgt af de resterende elementer nedad i kolonnen.
En vigtig observation er, at for at beregne Lᵢᵢ, skal kvadratroden af et tal tages. Hvis matricen A er positiv-definit, vil tallet under kvadratroden altid være positivt, hvilket garanterer, at processen kan gennemføres med reelle tal. Hvis processen fejler (dvs. man forsøger at tage kvadratroden af et negativt tal), er det et bevis på, at den oprindelige matrix ikke var positiv-definit.
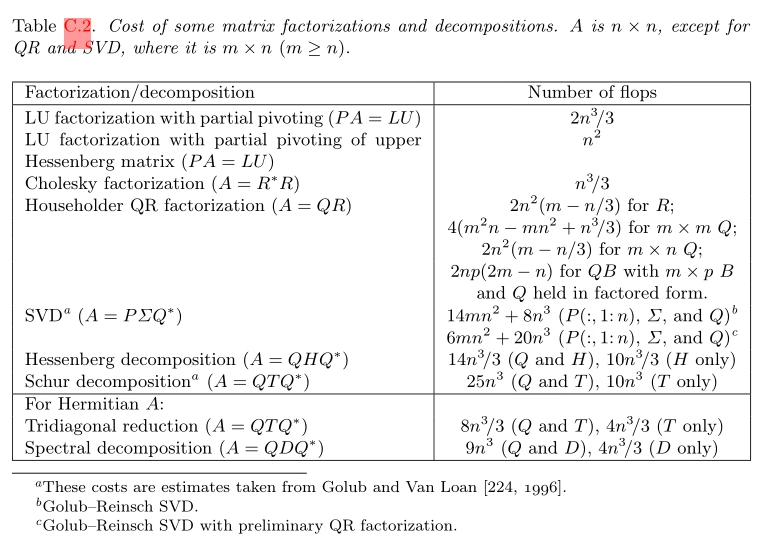
Den samlede beregningsmæssige kompleksitet for at finde Cholesky-faktoren af en n x n matrix er cirka n³/3 flydende kommatalsoperationer. Dette er omtrent halvt så mange operationer som krævet af LU-dekomponering, hvilket gør Cholesky-faktorisering meget effektiv for de matricer, hvor den kan anvendes.
Praktiske anvendelser af Cholesky-faktorisering
Cholesky-faktorisering er ikke blot en teoretisk øvelse; den har afgørende anvendelser inden for mange tekniske og videnskabelige felter.
Løsning af lineære ligningssystemer
En af de mest almindelige anvendelser er at løse ligningssystemet Ax = b, hvor A er en symmetrisk, positiv-definit matrix. Ved at bruge faktoriseringen A = LLᵀ, kan vi omskrive ligningen til LLᵀx = b. Dette problem kan løses i to simple trin:
- Løs Ly = b for y. Dette kaldes "forward substitution", da L er nedre triangulær.
- Løs Lᵀx = y for x. Dette kaldes "backward substitution", da Lᵀ er øvre triangulær.
At løse ligninger med triangulære matricer er meget hurtigere og mere numerisk stabilt end at invertere den oprindelige matrix A.
Kalman-filtrering og numerisk stabilitet
I avancerede signalbehandlings- og kontrolsystemer, såsom Kalman-filtre, spiller kovariansmatricer en central rolle. Disse matricer er pr. definition symmetriske og (ideelt set) positiv-definite. I numeriske beregninger kan små afrundingsfejl dog føre til, at en kovariansmatrix mister sin positiv-definithed, hvilket kan få filteret til at divergere og give meningsløse resultater.
For at imødegå dette anvendes en variant kaldet "Square Root Kalman Filtering". I stedet for at arbejde direkte med kovariansmatricen P, arbejder algoritmen med dens Cholesky-faktor S (hvor P = SSᵀ). Ved at opdatere og propagere S i stedet for P, sikres det, at den rekonstruerede kovariansmatrix altid forbliver mindst positiv semi-definit. Dette forbedrer algoritmens stabilitet og robusthed markant, især i systemer med begrænset numerisk præcision.
Monte Carlo-simulering
I finans og statistik bruges Monte Carlo-metoder til at simulere systemer med korrelerede tilfældige variable. Hvis man har en kovariansmatrix Σ, der beskriver sammenhængen mellem forskellige variable, kan man bruge Cholesky-faktorisering (Σ = LLᵀ) til at generere korrelerede stikprøver. Hvis z er en vektor af uafhængige, standard normalfordelte tilfældige tal, så vil vektoren x = Lz have en fordeling med den ønskede kovariansmatrix Σ.
Fordele og Betingelser
For at opsummere, lad os se på fordelene ved Cholesky-faktorisering i forhold til andre metoder som f.eks. LU-dekomponering, samt de nødvendige betingelser for dens anvendelse.
| Aspekt | Cholesky-faktorisering | Generel LU-dekomponering |
|---|---|---|
| Betingelser | Matricen skal være symmetrisk og positiv-definit. | Kan anvendes på de fleste kvadratiske matricer. |
| Effektivitet | Cirka n³/3 operationer. Meget hurtig. | Cirka 2n³/3 operationer. Dobbelt så langsom. |
| Numerisk Stabilitet | Meget stabil. Kræver ikke pivotering. | Kan være ustabil uden pivotering (ombytning af rækker). |
| Hukommelseskrav | Kræver kun lagerplads til den nedre triangulære matrix. | Kræver lagerplads til både L og U matricerne. |
Ofte Stillede Spørgsmål (FAQ)
Kan Cholesky-faktorisering anvendes på enhver matrix?
Nej, det er en specialiseret metode. Den kan kun anvendes på matricer, der opfylder to strenge krav: de skal være symmetriske og positiv-definite. Hvis en matrix ikke opfylder disse krav, vil beregningsprocessen fejle.
Hvad er forskellen mellem Cholesky- og LU-dekomponering?
LU-dekomponering faktoriserer en generel kvadratisk matrix A til A = LU, hvor L er en nedre triangulær matrix og U er en øvre triangulær matrix. Cholesky-faktorisering er et specialtilfælde for symmetriske, positiv-definite matricer, hvor U = Lᵀ. Dette gør Cholesky-faktorisering dobbelt så hurtig og mere numerisk stabil for den type matricer, den er designet til.
Hvorfor kaldes det "kvadratrods"-filtrering i Kalman-filtre?
Navnet kommer af, at Cholesky-faktoren L kan ses som en form for "matrix-kvadratrod" af kovariansmatricen P, da P = LLᵀ. Ved at arbejde med L i stedet for P undgår algoritmen eksplicit at kvadrere tal, hvilket kan forstærke afrundingsfejl. Dette bevarer den numeriske præcision og sikrer, at kovariansmatricen forbliver gyldig.
Er Cholesky-faktorisering unik?
Ja. For en given symmetrisk, positiv-definit matrix findes der kun én nedre triangulær matrix L med strengt positive elementer på diagonalen, som opfylder A = LLᵀ. Denne unikhed er en af de egenskaber, der gør metoden så pålidelig.
Hvis du vil læse andre artikler, der ligner Cholesky-faktorisering: En Komplet Guide, kan du besøge kategorien Sundhed.