02/09/2000
Asynkrone motorer, ofte kaldet induktionsmotorer, er de mest almindelige elektriske motorer i verden. Fra store industrielle maskiner til simple husholdningsapparater som ventilatorer og pumper, udgør disse motorer rygraden i vores moderne samfund. Deres popularitet skyldes en kombination af robusthed, pålidelighed, lave omkostninger og enkel vedligeholdelse. Navnet 'asynkron' stammer fra det faktum, at motorens rotor roterer med en hastighed, der er lidt lavere end det roterende magnetfelt i statoren – de er altså ikke 'i synkron'. Denne artikel vil give en dybdegående forklaring på, hvad en asynkron motor er, hvordan den er opbygget, dens arbejdsprincip, og hvorfor den adskiller sig fra sin synkrone modpart.
Hvad er en Asynkron Motor?
En asynkron motor er en type vekselstrømsmotor (AC-motor), hvor den mekaniske rotation af rotoren opnås ved hjælp af et roterende magnetfelt, der genereres af statoren. Det unikke ved denne motortype er, at strømmen i rotoren ikke tilføres direkte via elektriske forbindelser, men derimod induceres af statorens magnetfelt. Dette er grunden til, at den også kaldes en induktionsmotor. Rotoren 'jager' konstant det roterende magnetfelt, men opnår aldrig helt samme hastighed. Denne forskel i hastighed er afgørende for motorens funktion og kaldes 'slip'. Uden slip ville der ikke blive induceret nogen strøm i rotoren, og dermed ville der ikke blive genereret noget drejningsmoment.
Især trefasede asynkrone motorer er udbredte i industrien på grund af deres enkle, men effektive design. De er selvstartende, kræver minimal vedligeholdelse og har en god ydeevne sammenlignet med enfasede motorer. Deres primære kendetegn er, at deres driftshastighed er tæt på konstant og primært afhænger af forsyningsfrekvensen og antallet af poler i motoren.
Opbygning og Konstruktion
En asynkron motors konstruktion er relativt simpel og består hovedsageligt af to dele: statoren og rotoren.
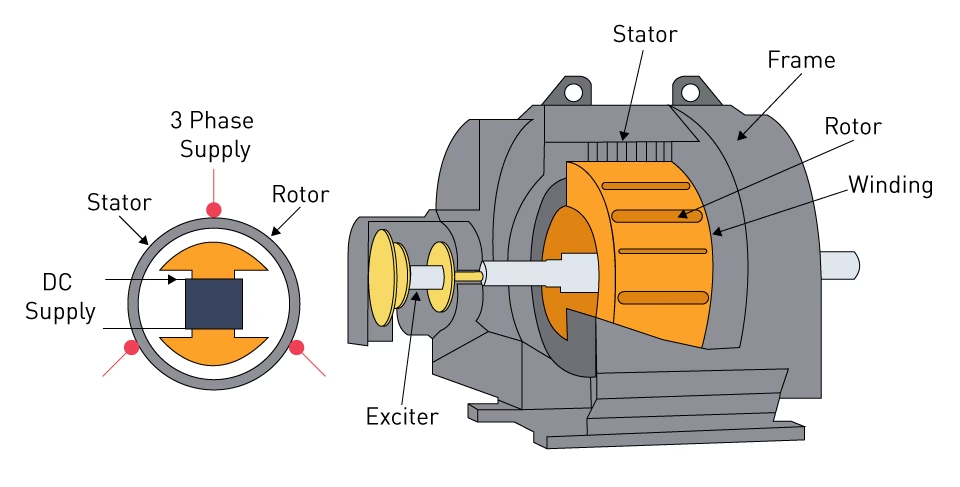
Stator
Statoren er den stationære del af motoren. Den består af en lamineret jernkerne med riller, hvori der er placeret spoler (viklinger). Når en vekselstrøm tilføres disse viklinger, skabes der et roterende magnetfelt. Antallet af poler, som disse viklinger danner, bestemmer den synkrone hastighed af magnetfeltet sammen med frekvensen af den tilførte strøm.
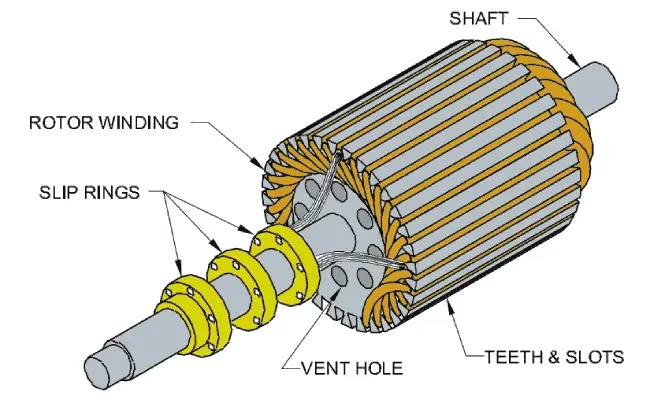
Rotor
Rotoren er den roterende del af motoren, som er monteret på akslen. Der findes primært to typer rotorer:
- Kortslutningsrotor (Squirrel Cage Rotor): Dette er den mest almindelige type. Den består af massive ledende stænger af kobber eller aluminium, som er placeret i riller i rotorens jernkerne. Stængerne er kortsluttet i begge ender af enderinge. Konstruktionen ligner et bur til et egern, deraf navnet 'squirrel cage'. Denne type rotor er ekstremt robust og billig at fremstille.
- Viklet Rotor (Wound Rotor): Denne type har viklinger ligesom statoren. Viklingerne er forbundet til slæberinge på akslen, hvilket gør det muligt at tilslutte eksterne modstande til rotorkredsløbet. Dette bruges primært til at kontrollere motorens startegenskaber og hastighed, men denne type er dyrere og kræver mere vedligeholdelse.
Arbejdsprincip: Elektromagnetisk Induktion
Princippet bag en asynkron motor er elektromagnetisk induktion, meget lig princippet i en transformer. Her er en trin-for-trin forklaring:
- Skabelse af Roterende Magnetfelt: Når den trefasede vekselstrøm tilsluttes statorviklingerne, skaber den et magnetfelt, der roterer med en konstant hastighed. Denne hastighed kaldes den synkrone hastighed (Ns) og beregnes ud fra forsyningsfrekvensen (f) og antallet af poler (P): Ns = (120 * f) / P.
- Induktion i Rotoren: Det roterende magnetfelt fra statoren 'skærer' igennem de ledende stænger i rotoren. Da rotoren i starten står stille, er der en relativ bevægelse mellem feltet og rotorstængerne. Ifølge Faradays lov om induktion, inducerer denne relative bevægelse en spænding og dermed en strøm i rotorstængerne.
- Skabelse af Rotormagnetfelt: Strømmen, der nu løber i de kortsluttede rotorstænger, skaber sit eget magnetfelt omkring rotoren.
- Drejningsmoment og Rotation: De to magnetfelter – statorens roterende felt og rotorens inducerede felt – interagerer med hinanden. Ifølge Lenz' lov vil det inducerede felt i rotoren forsøge at modvirke årsagen til sin egen skabelse, hvilket er den relative bevægelse. For at minimere denne relative bevægelse begynder rotoren at rotere i samme retning som statorens magnetfelt.
Rotoren accelererer, indtil det drejningsmoment, den producerer, er i balance med den mekaniske belastning på akslen. Den vil dog aldrig nå den fulde synkrone hastighed. Hvis den gjorde det, ville der ikke være nogen relativ bevægelse, ingen induceret strøm, og dermed intet drejningsmoment. Forskellen mellem den synkrone hastighed og den faktiske rotorhastighed er det, vi kalder slip.
Sammenligning: Asynkron Motor vs. Synkron Motor
Selvom de begge er AC-motorer, er der fundamentale forskelle mellem asynkrone og synkrone motorer. Nedenstående tabel fremhæver de vigtigste forskelle.
| Funktion | Asynkron Motor (Induktionsmotor) | Synkron Motor |
|---|---|---|
| Hastighed | Roterer med en hastighed lavere end den synkrone hastighed (N < Ns). Hastigheden falder en smule med øget belastning. | Roterer med præcis den synkrone hastighed (N = Ns). Hastigheden er konstant uanset belastning. |
| Slip | Har et slip, som er nødvendigt for at skabe drejningsmoment. Værdien er større end nul. | Har intet slip. Værdien er nul. |
| Start | Er selvstartende. | Er ikke selvstartende og kræver en speciel startmekanisme (f.eks. dæmperviklinger). |
| Rotorforsyning | Rotorstrømmen induceres fra statoren. Kræver ingen ekstern strømforsyning til rotoren. | Rotoren kræver en ekstern DC-strømforsyning (eller permanente magneter) for at skabe et magnetfelt. |
| Effektfaktor (Power Factor) | Arbejder altid med en 'lagging' (induktiv) effektfaktor. | Kan arbejde med 'lagging', 'leading' eller enhedseffektfaktor ved at justere rotorstrømmen. |
| Omkostninger og Vedligehold | Lavere omkostninger og meget simpel vedligeholdelse (især kortslutningsrotor). | Højere omkostninger og mere kompleks vedligeholdelse pga. slæberinge og DC-forsyning. |
| Effektivitet | Generelt lidt lavere effektivitet. | Generelt højere effektivitet. |
Fordele og Anvendelser
Asynkrone motorer har en række markante fordele, som har gjort dem til det foretrukne valg i utallige applikationer:
- Lave omkostninger: Simpel konstruktion, især for kortslutningsmotoren, gør dem billige at producere.
- Robusthed og Pålidelighed: Fraværet af børster og slæberinge (i kortslutningsmotoren) betyder færre dele, der kan slides, hvilket resulterer i lang levetid og høj driftssikkerhed.
- Nem vedligeholdelse: Kræver typisk kun periodisk smøring af lejer.
- Selvstartende: Trefasede modeller kræver ingen ekstern startmekanisme.
Disse fordele gør dem ideelle til en bred vifte af anvendelser, herunder:
- Pumper og ventilatorer
- Kompressorer
- Transportbånd (conveyors)
- Elevatorer og kraner
- Værktøjsmaskiner (drejebænke, fræsere)
- Papir- og tekstilfabrikker
Hastighedsregulering med Frekvensomformer
Traditionelt set blev asynkrone motorer betragtet som motorer med fast hastighed. Men med udviklingen af kraftelektronik er dette ændret drastisk. I dag er den mest almindelige og effektive måde at regulere hastigheden på en asynkron motor ved hjælp af en frekvensomformer (Variable Frequency Drive - VFD). En VFD ændrer frekvensen (og spændingen) af den strøm, der tilføres motoren. Da motorens synkrone hastighed er direkte proportional med frekvensen, giver dette en præcis og effektiv kontrol over motorens omdrejningstal. Dette har åbnet op for energibesparelser i applikationer som pumper og ventilatorer, hvor belastningen varierer.
Ofte Stillede Spørgsmål (FAQ)
Hvorfor kaldes en asynkron motor også for en induktionsmotor?
Den kaldes en induktionsmotor, fordi den fungerer efter princippet om elektromagnetisk induktion. Strømmen i rotoren bliver 'induceret' af det roterende magnetfelt fra statoren, uden nogen form for direkte elektrisk kontakt.
Hvilke typer asynkrone motorer findes der?
De primære typer er enfasede og trefasede motorer. Trefasede motorer er de mest almindelige i industrielle applikationer på grund af deres effektivitet og selvstartende natur. Enfasede motorer bruges i mindre applikationer og kræver en startmekanisme (f.eks. en kondensator).
Hvad er den vigtigste egenskab ved en asynkron motor?
Den vigtigste egenskab er dens robuste og simple design, som gør den ekstremt pålidelig og billig. Dens driftshastighed er næsten konstant under en given frekvens, men den har altid et 'slip' i forhold til den synkrone hastighed.
Hvad er effektfaktoren for en asynkron motor?
En asynkron motor arbejder altid med en forsinket (lagging) effektfaktor, fordi den kræver reaktiv effekt for at opbygge sit magnetfelt. Dette er en af dens få ulemper sammenlignet med en synkron motor.
Hvis du vil læse andre artikler, der ligner Asynkron Motor: En Komplet Guide, kan du besøge kategorien Teknologi.