13/06/2025
Robotter i sundhedssektoren er ikke længere science fiction. De er en realitet på operationsstuer, i laboratorier og på hospitalsgange, hvor de assisterer med alt fra komplekse kirurgiske indgreb til transport af medicin. Men hvad er den underliggende teknologi, der gør det muligt for disse avancerede maskiner at fungere så intelligent og koordineret? Svaret ligger ofte i et kraftfuldt, fleksibelt og open-source framework kendt som ROS eller Robot Operating System. Selvom navnet antyder et traditionelt operativsystem som Windows eller macOS, er ROS i virkeligheden et mellemlag – en samling af softwareværktøjer og biblioteker, der markant forenkler opgaven med at skabe kompleks robotadfærd.

Hvad er Robot Operating System (ROS)?
Robot Operating System (ROS) er et open-source software-framework designet specifikt til at udvikle robotapplikationer. Det blev oprindeligt udviklet i 2007 af Willow Garage, et forskningslaboratorium inden for robotteknologi, og vedligeholdes i dag af Open Robotics. Formålet med ROS var at skabe en standardiseret platform, så udviklere ikke behøvede at genopfinde den grundlæggende funktionalitet for hver ny robot. I stedet kan de fokusere på at skabe innovativ og specialiseret adfærd.
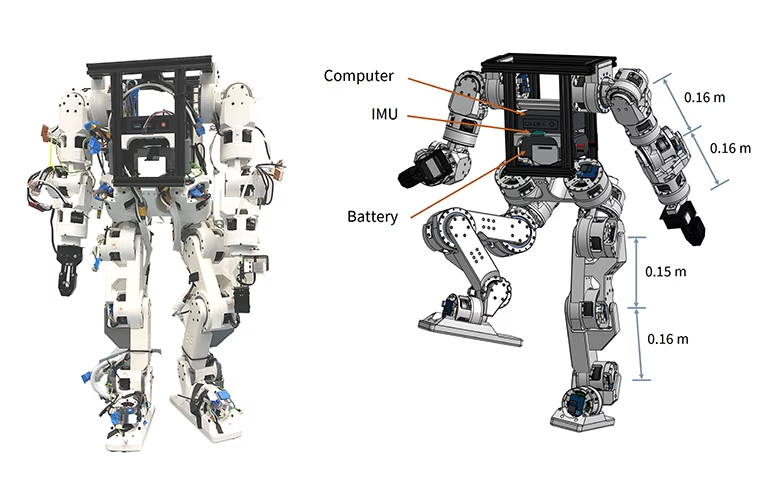
ROS fungerer som et kommunikationslag, der lader forskellige dele af et robotsystem tale sammen, uanset om de kører på den samme computer eller på tværs af et netværk. Forestil dig en avanceret kirurgisk robot: den har kameraer, sensorer, motoriserede arme og en computer til at behandle data. ROS sikrer, at information fra kameraet problemfrit kan bruges til at styre armens bevægelser med mikrometerpræcision. Denne evne til at integrere hardware og software er grunden til, at ROS er blevet en global standard inden for robotforskning og i stigende grad i kommercielle applikationer, herunder i den innovative sundhedssektoren.
Kernefunktioner i ROS
ROS' popularitet skyldes en række kraftfulde designfilosofier og funktioner, der gør det ideelt til komplekse systemer som medicinske robotter.
Modulær Arkitektur
En af de mest fremtrædende egenskaber ved ROS er dens modulære opbygning. Et ROS-system består af små, uafhængige programmer kaldet "knudepunkter" (nodes). Hvert knudepunkt har en specifik opgave, f.eks. at læse data fra en sensor, styre en motor eller planlægge en rute. Disse knudepunkter er samlet i "pakker" (packages). Denne arkitektur kan sammenlignes med at bygge med legoklodser: Man kan nemt tilføje, fjerne eller udskifte en klods (et knudepunkt) uden at skulle ændre hele strukturen. For en hospitalsrobot betyder det, at man kan tilføje en ny sensor eller opgradere navigationssoftwaren uden at skulle redesigne hele robotten.
Kommunikationsværktøjer: Emner og Tjenester
Kernen i ROS er et robust kommunikationssystem, der muliggør problemfri interaktion mellem knudepunkter. Dette sker primært via to mekanismer:
- Emner (Topics): Emner fungerer som en opslagstavle, hvor et knudepunkt (en "publisher") kan offentliggøre en strøm af data, f.eks. live video fra et endoskop eller patientens hjerterytme. Andre knudepunkter ("subscribers") kan abonnere på disse data og reagere på dem i realtid. Dette er ideelt til kontinuerlige datastrømme.
- Tjenester (Services): Tjenester bruges til anmodning/svar-interaktioner. Et knudepunkt kan anmode om en specifik handling fra et andet knudepunkt og vente på et svar. For eksempel kan en central styringsenhed sende en anmodning til en robotarm: "Bevæg dig til koordinat (X, Y, Z)", og armen vil svare "Udført" eller "Fejl", når opgaven er fuldført.
Integration med Sensorer og Aktuatorer
ROS excellerer i at forbinde software med den fysiske verden. Der findes et stort bibliotek af drivere og værktøjer, der gør det nemt at integrere en bred vifte af sensorer (som LiDAR til navigation, kameraer til billedgenkendelse) og aktuatorer (som motorer og gribere). Denne alsidighed gør ROS til en ideel platform for at bygge robotter, der kan opfatte og interagere med dynamiske og uforudsigelige miljøer som et hospital.
Anvendelser af ROS i Sundhed og Pleje
ROS' fleksibilitet har åbnet døren for en bølge af innovation inden for medicinsk teknologi. Her er nogle af de mest lovende områder:
Kirurgisk Automation
I moderne kirurgi er præcision altafgørende. ROS-baserede systemer gør det muligt at udvikle robotassistenter, der kan forbedre en kirurgs evner. Ved at integrere data fra 3D-scanninger, realtids-sensorfeedback fra instrumenter og højopløselige kameraer kan en robotarm udføre bevægelser med en stabilitet og nøjagtighed, som overgår menneskets. Dette fører til mindre invasive indgreb, hurtigere heling og bedre resultater for patienten.
Rehabilitering og Proteser
For patienter, der har mistet mobilitet, kan robotteknologi gøre en enorm forskel. ROS bruges til at udvikle intelligente exoskeletter og avancerede proteser. Disse enheder kan bruge sensorer til at aflæse brugerens intentioner, f.eks. via muskelsignaler, og derefter yde den nødvendige støtte. Den modulære natur af ROS gør det muligt for forskere hurtigt at prototype og teste nye kontrolstrategier for at skabe mere intuitive og effektive hjælpemidler.
Hospitalslogistik og Automatisering
Hospitaler er komplekse økosystemer, hvor effektiv logistik kan redde liv. ROS-drevne autonome mobile robotter (AMR'er) kan navigere i travle hospitalsgange for at levere medicin, sterile instrumenter, linned eller laboratorieprøver. Dette frigør værdifuld tid for sygeplejersker og læger, så de kan fokusere på patientpleje. ROS' avancerede navigationspakker gør robotterne i stand til at undgå forhindringer og mennesker på en sikker måde.
Forskning og Uddannelse
Fordi ROS er open-source, er det et uvurderligt værktøj for universiteter og forskningsinstitutioner. Det sænker adgangsbarrieren for at udvikle banebrydende medicinsk teknologi. Forskere over hele verden kan bygge videre på hinandens arbejde, dele kode og samarbejde om at løse komplekse udfordringer, hvilket accelererer innovationen inden for medicinsk robotteknologi.
Sammenligning: ROS vs. Proprietære Systemer
Valget af softwareplatform har stor betydning for udviklingen af medicinske robotter. Her er en sammenligning mellem en open-source tilgang som ROS og traditionelle proprietære systemer.
| Egenskab | ROS (Robot Operating System) | Proprietære Systemer |
|---|---|---|
| Omkostninger | Gratis softwarelicens, hvilket reducerer startomkostningerne. | Høje licens-, udviklings- og vedligeholdelsesomkostninger. |
| Fleksibilitet | Ekstremt høj. Kan tilpasses enhver hardware og opgave. | Begrænset til leverandørens hardware- og softwareøkosystem. |
| Fællesskab & Support | Stort, globalt fællesskab giver support, tutorials og tusindvis af genanvendelige pakker. | Support er afhængig af og begrænset til den enkelte leverandør. |
| Gennemsigtighed | Fuld adgang til kildekoden muliggør dybdegående sikkerheds- og kvalitetsaudits. | Fungerer som en "sort boks", hvor den interne logik er skjult. |
| Certificering | Udfordrende. Kræver en grundig validerings- og dokumentationsproces for at opnå medicinsk godkendelse (f.eks. CE-mærkning). | Leveres ofte præ-certificeret til specifikke, godkendte anvendelser. |
Ofte Stillede Spørgsmål (FAQ)
Er ROS sikkert nok til medicinsk brug?
I sin standardform er ROS et udviklings- og forskningsværktøj. For at blive brugt i kritiske medicinske applikationer kræver det betydelig "hærdning" – en proces, hvor der tilføjes ekstra lag af sikkerhed, redundans og fejltjek. Mange virksomheder bruger ROS som fundament og bygger derefter deres egne proprietære, certificerede softwarelag ovenpå. Den nyere version, ROS 2, er designet med forbedret sikkerhed og realtidsydelse for øje, hvilket gør den bedre egnet til kommercielle og missionskritiske systemer. Den peer-to-peer-baserede kommunikation sikrer også, at der ikke er et enkelt centralt punkt, der kan fejle.
Hvad er den primære forskel mellem ROS 1 og ROS 2?
ROS 2 er en fuldstændig omskrivning af ROS 1, designet til at imødekomme behovene i industrien. De vigtigste forbedringer inkluderer understøttelse af realtidssystemer (afgørende for præcis motorstyring), forbedret sikkerhed, evnen til at køre på mindre indlejrede systemer og mere pålidelig kommunikation i netværk med dårlig kvalitet. For nye, krævende projekter inden for sundhedssektoren er ROS 2 generelt det anbefalede valg.
Anvendes ROS på rigtige hospitaler i dag?
Ja, men primært i applikationer, der ikke er direkte livskritiske, såsom logistikrobotter, telepresence-robotter og i rehabiliteringsudstyr. I kritiske applikationer som kirurgi bruges ROS oftest i forsknings- og udviklingsfasen. De principper og algoritmer, der udvikles med ROS, finder dog vej til de endelige, kommercielle og certificerede produkter.
Konklusion: Et Værktøj til Fremtidens Sundhed
Robot Operating System (ROS) er mere end bare et stykke software; det er en katalysator for innovation. Ved at tilbyde en standardiseret, fleksibel og tilgængelig platform demokratiserer ROS udviklingen af robotteknologi. I sundhedssektoren betyder det, at vejen fra en god idé til en fungerende prototype er blevet kortere og billigere. Mens der stadig er udfordringer, især omkring sikkerhed og regulatorisk godkendelse, er potentialet enormt. ROS er med til at bygge fundamentet for den næste generation af medicinske robotter, der vil levere mere præcis kirurgi, mere effektiv rehabilitering og en mere intelligent og automatiseret pleje til patienter over hele verden.
Hvis du vil læse andre artikler, der ligner ROS: Fremtidens Robotter i Sundhedssektoren, kan du besøge kategorien Sundhed.