19/02/2011
Robotter er ikke længere kun science fiction; de er en integreret del af vores industri, forskning og endda vores hjem. Men hvad driver disse komplekse maskiner? Hvordan kan en robot opfatte sine omgivelser, træffe beslutninger og udføre præcise opgaver? Svaret ligger ofte i softwaren, og her er en af de mest revolutionerende teknologier Robot Operating System, bedre kendt som ROS. Selvom navnet indeholder "Operating System", er det vigtigt at forstå, at ROS ikke er et traditionelt operativsystem som Windows eller Linux. Det er snarere et fleksibelt og kraftfuldt framework designet til at gøre udviklingen af robotsoftware nemmere, hurtigere og mere standardiseret. Denne artikel vil guide dig gennem, hvad ROS er, hvordan det fungerer, og hvorfor det er blevet en de facto-standard inden for robotik.
Hvad er Robot Operating System (ROS) Præcist?
Robot Operating System kan bedst beskrives som et sæt af softwarebiblioteker, værktøjer og konventioner, der hjælper udviklere med at bygge robotapplikationer. Det er et open source-projekt, hvilket betyder, at kildekoden er frit tilgængelig for alle at bruge, modificere og distribuere. Denne åbenhed har skabt et enormt globalt fællesskab af udviklere og forskere, der konstant bidrager med nye funktioner, retter fejl og hjælper hinanden.
Kernen i ROS-filosofien er modularitet. I stedet for at skulle skrive et massivt, monolitisk program for at styre en robot, giver ROS udviklere mulighed for at bygge et komplekst system ved at forbinde mange små, uafhængige programmer (kaldet "noder"). Hver node har ansvaret for en specifik opgave, f.eks. at læse data fra en laserscanner, styre motorerne i hjulene eller planlægge en rute fra A til B. Disse noder kommunikerer med hinanden ved at sende beskeder over navngivne kanaler (kaldet "topics"). Denne arkitektur gør det utroligt nemt at genbruge kode, udskifte komponenter og fejlfinde systemet, da man kan isolere og teste hver del for sig.
ROS: Et Meta-Operativsystem, Ikke et Traditionelt OS
En af de mest almindelige misforståelser er, at ROS erstatter operativsystemet på en computer. Dette er ikke korrekt. ROS er et såkaldt meta-operativsystem, hvilket betyder, at det kører oven på et eksisterende, underliggende operativsystem. Det håndterer ikke grundlæggende opgaver som hukommelsesstyring eller processcheduling; det overlader det til det underliggende OS.
ROS stiller dog store krav til det operativsystem, det kører på. Det har brug for et system, der er stabilt, fleksibelt og tillader dybdegående modifikationer. Derfor er langt de fleste ROS-installationer baseret på Linux, og specifikt Ubuntu-distributionen. Årsagerne er flere:
- Åbenhed: Både ROS og Linux er open source, hvilket giver en perfekt synergi. Udviklere kan tilpasse både ROS og operativsystemet for at opfylde specifikke krav.
- Fællesskab og Support: Der er en enorm mængde dokumentation og community-support til at køre ROS på Ubuntu. Støder man på et problem, er der næsten med garanti en anden, der har løst det før.
- Stabilitet: Linux-baserede systemer er kendt for deres robusthed, hvilket er afgørende for robotter, der skal fungere pålideligt i lange perioder.
Selvom det er teknisk muligt at køre ROS på Windows og macOS, er supporten begrænset, og udviklere kan hurtigt løbe ind i udfordringer. For seriøs robotudvikling er kombinationen af ROS og Linux den ubestridte standard.
Kerneværktøjer i ROS-Økosystemet
ROS er mere end bare et kommunikationssystem; det er et helt økosystem af kraftfulde værktøjer, der strømliner udviklingsprocessen. To af de mest uundværlige værktøjer er RViz og Gazebo.
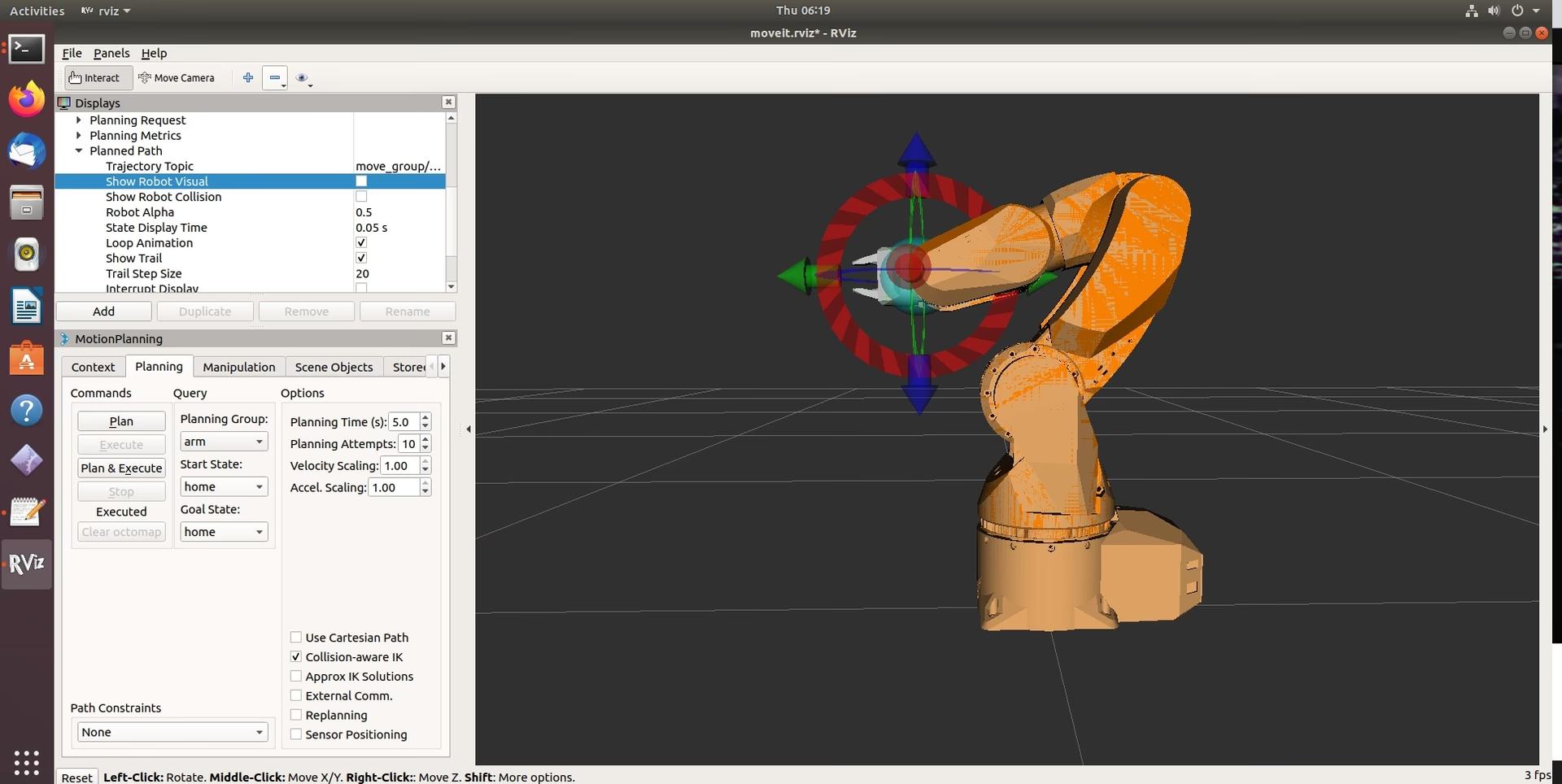
RViz: Robotens Øjne
RViz (Robot Visualization) er et 3D-visualiseringsværktøj, der er altafgørende for at forstå, hvad robotten "tænker" og "ser". Det lader udvikleren se verden fra robottens perspektiv. RViz kan visualisere data fra stort set alle typer sensorer: laserscannere, der viser en 2D- eller 3D-model af omgivelserne, kamerabilleder, der er overlejret i 3D-rummet, og de ruter, som robotten planlægger at følge. Det er et uvurderligt værktøj til debugging, da man visuelt kan bekræfte, om robottens opfattelse af virkeligheden stemmer overens med den faktiske verden.
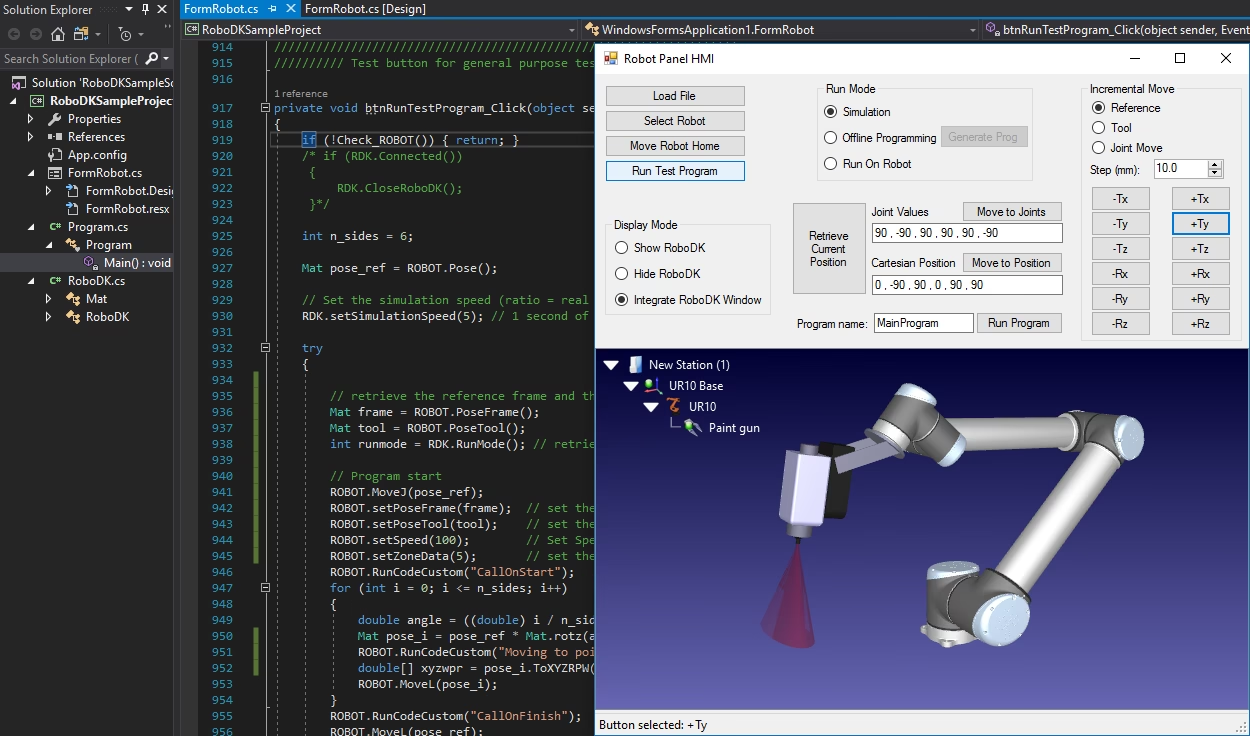
Gazebo: Den Virtuelle Legeplads
At teste kode på en fysisk robot kan være dyrt, tidskrævende og potentielt farligt. En simpel programmeringsfejl kan få en dyr robotarm til at kollidere med sig selv eller sine omgivelser. Her kommer Gazebo ind i billedet. Gazebo er en avanceret robotsimulator, der er tæt integreret med ROS. Den giver mulighed for at skabe en realistisk, virtuel 3D-verden, komplet med fysik (tyngdekraft, friktion osv.), sensorer og robotmodeller. Udviklere kan teste deres algoritmer i denne sikre, virtuelle verden, før de overfører dem til den fysiske robot. Denne proces med simulering sparer utallige timer og ressourcer i udviklingsfasen.
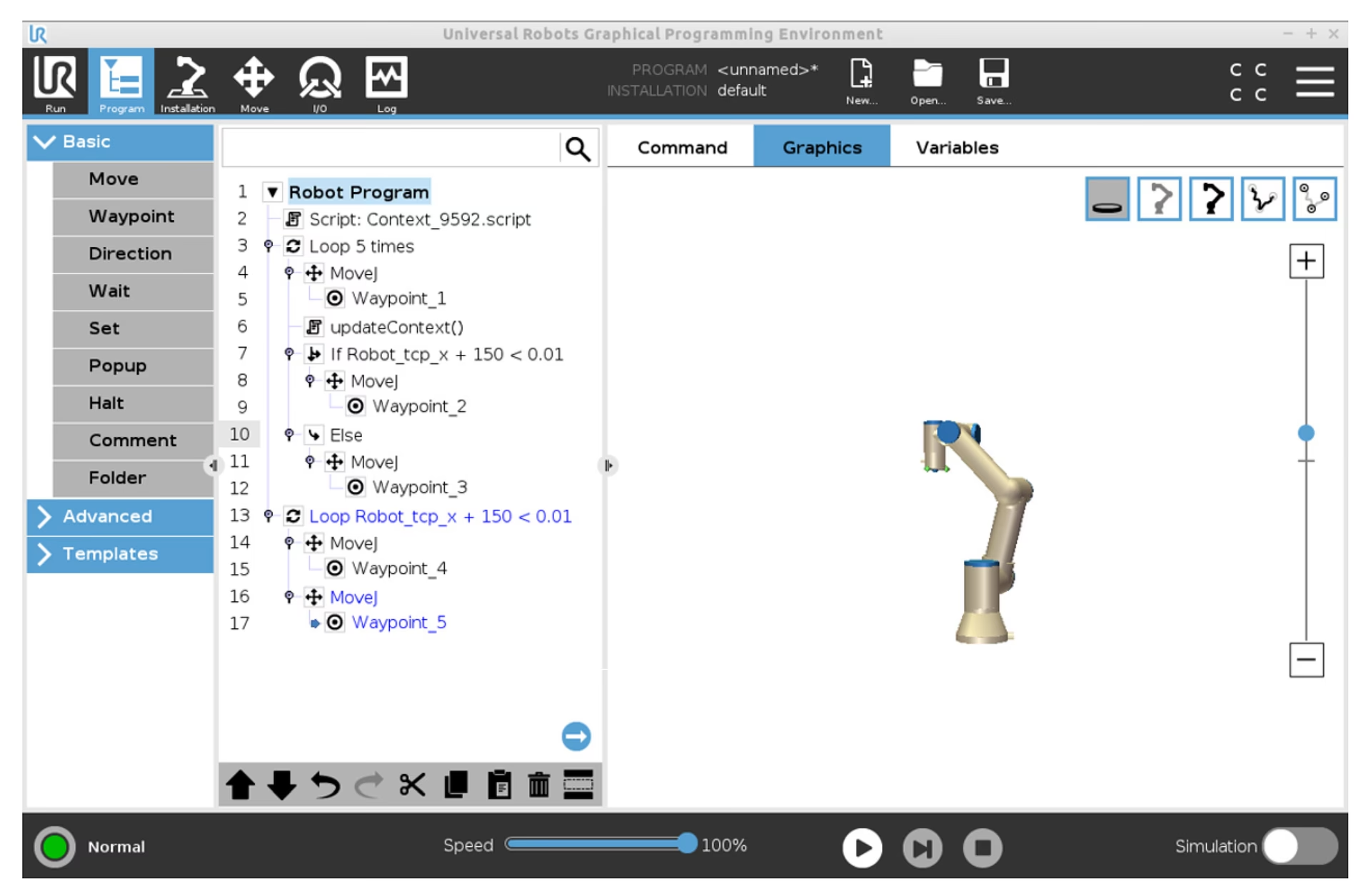
Hvordan Fungerer en Robot-Grænseflade i Praksis?
For at en robot kan styres og overvåges, kræves en effektiv grænseflade. I ROS-sammenhæng, og i mange moderne robotter, sker dette ofte via en realtidsgrænseflade. Denne grænseflade er en digital kommunikationskanal, der transmitterer data med meget høj hastighed – ofte op til 500 gange i sekundet (500Hz).
Denne hurtige dataudveksling bruges til to hovedformål:
- Transmission af Robottens Status: Grænsefladen sender konstant en strøm af data om robottens tilstand. Dette kan inkludere information som leddenes position, motorernes hastighed, sensor-aflæsninger og eventuelle systemfejl.
- Modtagelse af Kommandoer: Samtidig lytter grænsefladen efter kommandoer. Disse kommandoer, ofte sendt i et scriptingsprog som URScript, kan instruere robotten til at bevæge sig til en bestemt position, aktivere et værktøj eller udføre en kompleks sekvens af bevægelser.
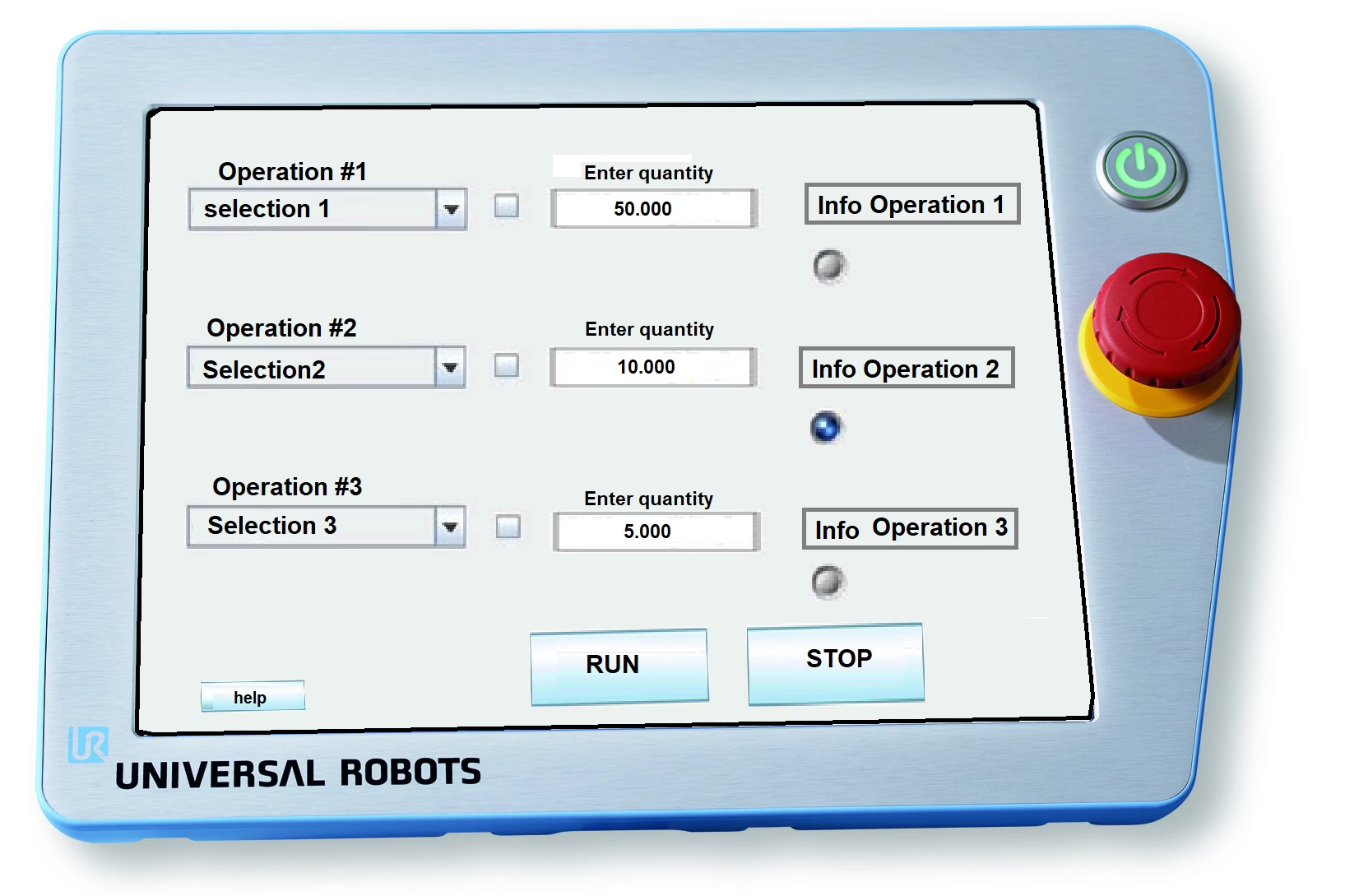
Praktiske anvendelser af denne teknologi inkluderer:
- Fjernstyring: Operatører kan styre robotten i realtid fra en sikker afstand, hvilket er essentielt i farlige miljøer.
- Realtidsovervågning: Ingeniører kan overvåge robottens ydeevne og sundhedstilstand live for at forudsige vedligeholdelsesbehov.
- Integration med Eksterne Systemer: Robotten kan integreres med andre maskiner på en fabrikslinje, f.eks. et transportbånd, for at skabe et fuldt automatiseret system.
- Fejlfinding: Når en robot ikke opfører sig som forventet, kan de detaljerede data fra grænsefladen bruges til hurtigt at diagnosticere problemet.
Sammenligning: ROS vs. Traditionel Robotprogrammering
For at sætte fordelene ved ROS i perspektiv, er her en tabel, der sammenligner udvikling med ROS med traditionelle, proprietære metoder.
| Funktion | Traditionel Robotprogrammering | Programmering med ROS |
|---|---|---|
| Genbrugelighed af Kode | Meget lav. Koden er ofte specifik for én hardwareplatform. | Meget høj. Noder kan nemt genbruges på tværs af forskellige robotter. |
| Kompleksitet | Høj. Man skal ofte bygge alt fra bunden, inklusive drivere. | Reduceret. Mange drivere og algoritmer er frit tilgængelige. |
| Værktøjer | Begrænsede og ofte proprietære. | Rig økosystem med visualisering (RViz), simulering (Gazebo) osv. |
| Fællesskab | Lille, ofte begrænset til producentens support. | Enormt globalt fællesskab med fora, tutorials og open source-bidrag. |
Ofte Stillede Spørgsmål (FAQ)
Er ROS et rigtigt operativsystem?
Nej, det er en almindelig misforståelse. ROS er et meta-operativsystem, der fungerer som et software-framework oven på et rigtigt operativsystem, typisk Linux. Det overtager ikke computerens grundlæggende funktioner.
Er det svært at lære ROS?
ROS har en vis indlæringskurve, især hvis man er ny til Linux og kommandolinjen. Men på grund af det store fællesskab og den omfattende dokumentation findes der utallige ressourcer, tutorials og eksempler, der gør det muligt for selv begyndere at komme i gang.
Hvilke robotter bruger ROS?
Enormt mange. ROS bruges i et bredt spektrum af applikationer, fra akademiske forskningsrobotter og hobbyprojekter til avancerede industrielle automationssystemer, selvkørende biler, droner og endda i rumforskning. Dets fleksibilitet gør det velegnet til næsten enhver type robot.
Hvorfor er open source så vigtigt for ROS?
Den åbne natur er kernen i ROS' succes. Det fremmer samarbejde og hurtig innovation, da udviklere fra hele verden kan bygge videre på hinandens arbejde. Det fjerner også afhængigheden af en enkelt leverandør og giver virksomheder mulighed for at tilpasse systemet præcist til deres behov uden at være bundet af proprietære licenser.
Konklusion
Robot Operating System har fundamentalt ændret den måde, vi udvikler robotter på. Ved at tilbyde en standardiseret, modulær og open source-platform har ROS sænket adgangsbarrieren til robotik og accelereret innovationen på tværs af industrien. Fra dets kraftfulde kommunikationsarkitektur til dets rige økosystem af værktøjer som RViz og Gazebo, giver ROS udviklere alt, hvad de behøver for at bygge den næste generation af intelligente maskiner. Selvom det ikke er et operativsystem i traditionel forstand, fungerer det som det centrale nervesystem for utallige robotter verden over og vil uden tvivl fortsætte med at forme fremtiden for robotteknologi.
Hvis du vil læse andre artikler, der ligner ROS: Fremtidens Robotstyresystem Forklaret, kan du besøge kategorien Sundhed.