26/03/2009
Robotassisteret kirurgi er ikke længere science fiction, men en etableret og transformerende realitet på hospitaler verden over. Denne avancerede form for minimalt invasiv kirurgi repræsenterer et kvantespring inden for medicinsk teknologi, hvor en kirurgs færdigheder forstærkes gennem en sofistikeret robotplatform. Det er vigtigt at understrege, at robotten ikke udfører operationen selv; den er et yderst præcist værktøj, der fuldt ud styres af en højt specialiseret kirurg, som sidder ved en konsol i operationsstuen. Denne synergi mellem menneske og maskine har åbnet døren for mere komplekse procedurer, der kan udføres med større præcision, mindre traume for patienten og forbedrede resultater. Fra de første spæde koncepter til nutidens avancerede systemer er historien om robotkirurgi en fascinerende rejse gennem innovation, ingeniørkunst og medicinsk fremskridt.
Fra Oldtidens Drømme til Moderne Robotter
Ideen om automater og selvstyrende maskiner er tusinder af år gammel. Fra de gamle grækeres dampdrevne duer til Leonardo da Vincis skitser af en mekanisk ridder i 1495, har menneskeheden længe været fascineret af at skabe maskiner, der kan efterligne menneskelige handlinger. Selve ordet "robot" stammer dog fra det tjekkiske ord "robota", der betyder "tvangsarbejde", og blev introduceret i 1921 af forfatteren Karel Čapek i hans skuespil "R.U.R. (Rossum's Universal Robots)". Det var dog først med udviklingen af computere og avanceret mekanik i det 20. århundrede, at drømmen om funktionelle robotter kunne blive til virkelighed, hvilket banede vejen for deres anvendelse inden for det mest krævende felt af alle: kirurgi.
De Tidlige Pionerer inden for Kirurgisk Robotik
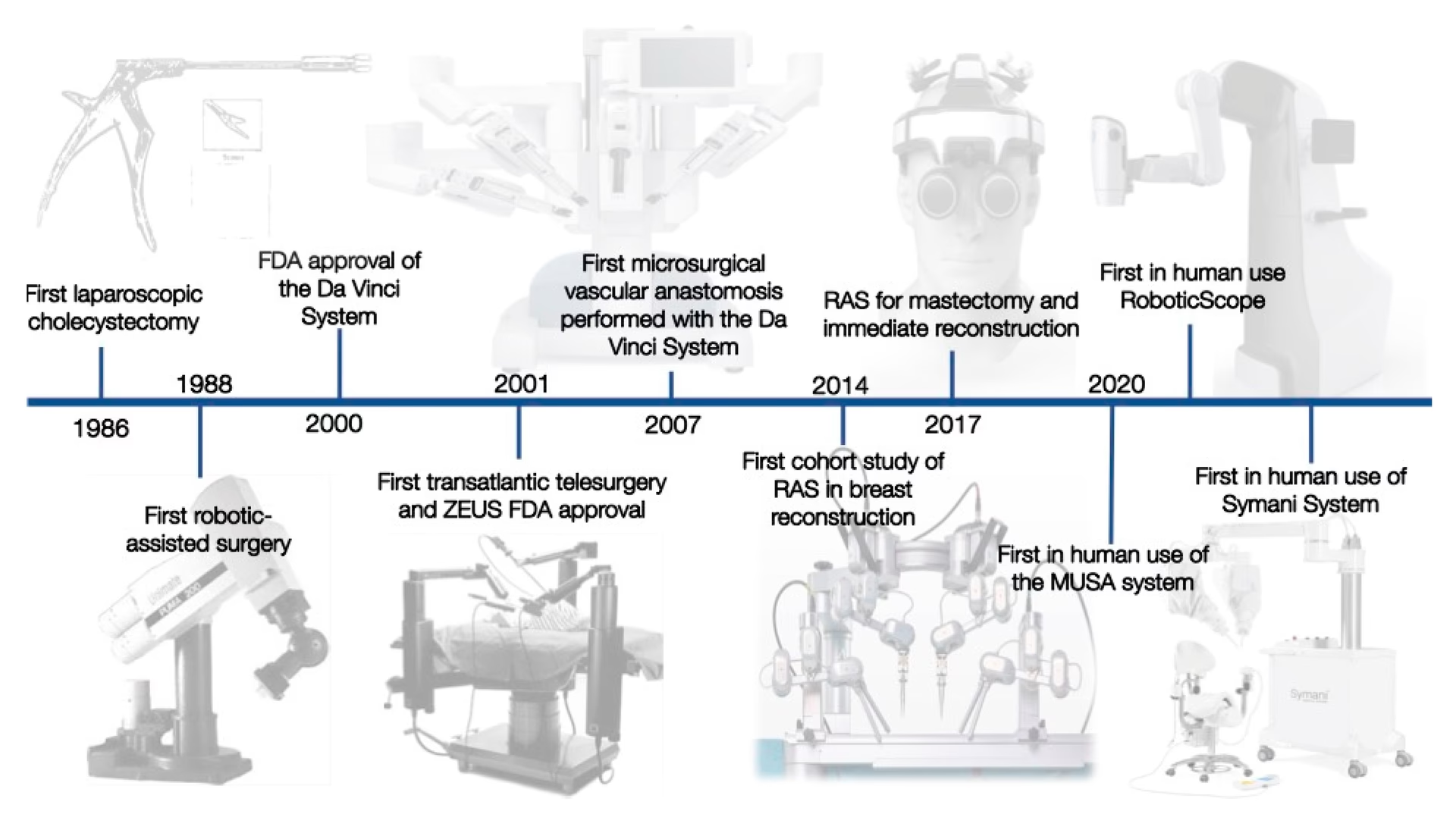
Anvendelsen af robotter i kirurgi begyndte for alvor for omkring 35 år siden. Et af de første dokumenterede tilfælde var i 1985, hvor robotarmen PUMA 200 (Programmable Universal Machine for Assembly) blev brugt til at udføre en neurokirurgisk biopsi med en præcision, der overgik menneskets hånd. Senere blev Robodoc®-systemet udviklet i 1992 til brug i ortopædkirurgi, specifikt til at udføre præcise udskæringer i knogler til hofteudskiftninger. Disse tidlige systemer var dog mere specialiserede og manglede den alsidighed, der kræves til generel kirurgi. Et afgørende gennembrud kom med udviklingen af AESOP (Automated Endoscopic System for Optimal Positioning) i 1994. AESOP var en stemmestyret robotarm designet til at holde og manøvrere det endoskopiske kamera under kikkertoperationer. Dette frigjorde assistentens hænder og gav kirurgen direkte kontrol over sit synsfelt, hvilket skabte et mere stabilt og roligt billede. AESOP blev kirurgens "tredje hånd" og var et vigtigt skridt mod de mere komplekse systemer, vi kender i dag.
Kampen om Operationsstuen: ZEUS vs. da Vinci
I slutningen af 1990'erne opstod der to konkurrerende systemer, som for alvor introducerede konceptet "telepresence surgery", hvor kirurgen fjernstyrer robotarme fra en konsol. Det ene system var ZEUS, udviklet af Computer Motion. Det bestod af tre separate arme, der blev monteret på operationsbordet, og kirurgen styrede dem fra en konsol med et 2D-videoskærm. ZEUS blev berømt for at have udført "Operation Lindberg" i 2001, hvor en kirurg i New York fjernede galdeblæren på en patient i Strasbourg, Frankrig, via en transatlantisk forbindelse. Dette demonstrerede det enorme potentiale for fjernkirurgi. Samtidig udviklede firmaet Intuitive Surgical sit eget system, som de kaldte da Vinci. Da Vinci-systemet havde fra starten flere teknologiske fordele, der skulle vise sig at være afgørende. Kirurgens konsol havde et stereoskopisk display, der gav et ægte 3D-HD-syn af operationsfeltet, hvilket markant forbedrede dybdeopfattelsen. Vigtigst af alt var instrumenterne udstyret med "Endowrist"-teknologi, som efterlignede det menneskelige håndleds bevægelsesfrihed med syv grader af frihed. Dette gav en hidtil uset kontrol og fingerfærdighed inde i patientens krop. Efter en juridisk kamp fusionerede de to firmaer i 2003, og udviklingen af ZEUS blev indstillet til fordel for det teknologisk overlegne da Vinci-system.
Da Vinci-systemets Evolution
Siden da Vinci-systemet fik FDA-godkendelse i 2000, har det gennemgået en konstant udvikling. Fra den første model med tre arme er platformen blevet opgraderet adskillige gange for at forbedre ydeevne, alsidighed og brugervenlighed.
- da Vinci S (2006): Introducerede high-definition (HD) vision for et skarpere billede.
- da Vinci Si (2009): Tilføjede muligheden for en dobbeltkonsol, så to kirurger kan samarbejde, eller en erfaren kirurg kan oplære en ny. Introducerede også Firefly™ Fluorescence Imaging, en teknologi der ved hjælp af et specielt farvestof kan visualisere blodgennemstrømning eller galdegange i realtid.
- da Vinci Xi (2014): Repræsenterer det mest avancerede system til dato. Xi-modellen har et helt nyt design med slankere, længere arme monteret på en overhead-bom. Denne arkitektur giver mulighed for docking fra enhver vinkel og gør det muligt at operere i flere kvadranter af maven uden at skulle flytte og omdokke hele robotsystemet. Instrumenterne er også blevet forbedret, og systemet understøtter en række avancerede energi- og stapling-instrumenter.
Denne konstante udvikling sikrer, at kirurger har adgang til den mest avancerede teknologi, hvilket muliggør mere komplekse og præcise indgreb.
Fordele ved Robotassisteret Kirurgi
For patienten er fordelene ved robotkirurgi sammenlignet med traditionel åben kirurgi mange. Fordi operationen udføres gennem små "nøglehuller" på 8-12 mm, er det fysiske traume på kroppen markant reduceret.
Sammenligning af Kirurgiske Metoder
| Egenskab | Traditionel Åben Kirurgi | Robotassisteret Kirurgi |
|---|---|---|
| Snitstørrelse | Stort, ofte 15-30 cm | Flere små snit (8-12 mm) |
| Blodtab | Potentielt betydeligt | Minimalt |
| Postoperative smerter | Ofte betydelige, kræver stærk smertestillende medicin | Mindre smerte, mindre behov for smertestillende |
| Hospitalsophold | Flere dage til uger | Typisk kortere, ofte 1-3 dage |
| Heling og tilbagevenden til normal aktivitet | Langsom, ofte 6-8 uger | Hurtigere, ofte 2-4 uger |
| Ardannelse | Stort, synligt ar | Små, mindre synlige ar |
For kirurgen giver robotten en forbedret visualisering med et forstørret 3D-HD-billede, en uovertruffen præcision takket være filtrering af håndrysten og nedskalering af bevægelser, samt forbedret ergonomi, da kirurgen sidder behageligt ved en konsol i stedet for at stå foroverbøjet over patienten i timevis.
Anvendelsesområder for Robotkirurgi
Robotkirurgi har vist sig værdifuld inden for en lang række specialer, især ved komplekse operationer i snævre områder af kroppen. Nogle af de mest almindelige anvendelsesområder inkluderer:
- Urologi: Særligt ved fjernelse af prostata pga. kræft (prostatektomi), hvor robottens præcision er afgørende for at bevare nervefunktion og undgå inkontinens og impotens.
- Gynækologi: Til fjernelse af livmoderen (hysterektomi), behandling af endometriose og visse former for kræft.
- Generel kirurgi: Til behandling af brok, galdeblæreoperationer, tarmkirurgi (især tyk- og endetarmskræft) og fedmekirurgi.
- Hjerte- og lungekirurgi: Til bypass-operationer og reparation af hjerteklapper.
- Hoved- og halskirurgi: Til fjernelse af tumorer i svælg og strube.
Fremtiden for Kirurgisk Robotik
Udviklingen af robotkirurgi er langt fra afsluttet. Fremtiden vil sandsynligvis bringe endnu mere avancerede systemer. Vi ser allerede, at flere virksomheder, som Johnson & Johnson, udvikler konkurrerende robotplatforme, hvilket vil øge innovationen og potentielt reducere omkostningerne. Fremtidige tendenser inkluderer:
- Mindre og mere specialiserede robotter: Systemer designet til specifikke procedurer, f.eks. single-port kirurgi (operation gennem et enkelt lille snit).
- Integration af kunstig intelligens (AI): AI kan hjælpe med at analysere billeder i realtid, identificere kritiske anatomiske strukturer og give kirurgen vejledning under operationen.
- Fjernkirurgi (Telesurgery): Med udbredelsen af 5G-netværk med lav forsinkelse kan "Operation Lindberg"-scenariet blive mere almindeligt, hvilket giver patienter i fjerntliggende områder adgang til specialiserede kirurger.
- Haptisk feedback: En af de nuværende begrænsninger er manglen på følesans. Fremtidige systemer vil sandsynligvis inkorporere haptisk feedback, så kirurgen kan "føle" vævets modstand gennem instrumenterne.
Ofte Stillede Spørgsmål (OSS)
Er robotkirurgi smertefuldt?
Takket være den minimalt invasive natur oplever patienter generelt mindre smerte efter en robotassisteret operation sammenlignet med en traditionel åben operation. De mindre snit betyder mindre vævsskade, hvilket fører til færre smerter og et reduceret behov for smertestillende medicin.
Erstatter robotten kirurgen?
Nej, absolut ikke. Robotten er et avanceret værktøj, der er 100% under kirurgens kontrol. Kirurgen træffer alle beslutninger og udfører alle bevægelser via konsollen. Robotten kan ikke tænke eller handle på egen hånd. Den forbedrer kirurgens evner, men erstatter dem ikke.
Hvad er de største fordele for patienten?
De primære fordele er mindre smerte, mindre blodtab, kortere hospitalsophold, hurtigere helingstid og mindre ardannelse. For mange komplekse procedurer fører den øgede præcision også til bedre kliniske resultater.
Er udviklingen af robotkirurgi afsluttet?
Nej, slet ikke. Vi er stadig i en tidlig fase af denne teknologiske revolution. Med fremskridt inden for miniaturisering, kunstig intelligens og netværksteknologi vil fremtidens kirurgiske robotter blive endnu mere kapable og integrerede i sundhedsvæsenet.
Hvis du vil læse andre artikler, der ligner Operation med Præcision: Robotkirurgiens Æra, kan du besøge kategorien Kirurgi.